Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning a Miniature Wheel Arrangement for Mobile Robot Platforms
Apr 02, 2011
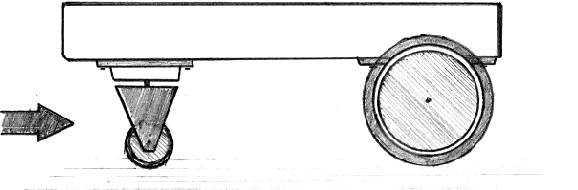

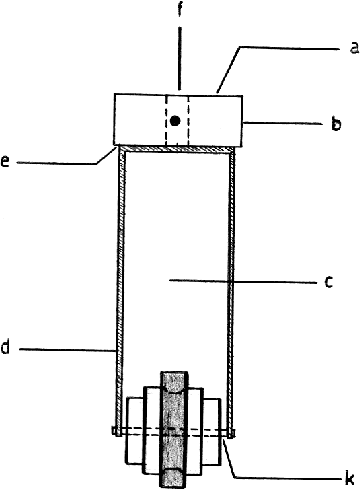
In this research report details of design of a miniature wheel arrangement are presented. This miniature wheel arrangement is essentially a direction control mechanism intended for use on a mobile robot platform or base. The design is a specific one employing a stepper motor as actuator and as described can only be used on a certain type of wheeled robots. However, as a basic steering control element, more than one of these miniature wheel arrangements can be grouped together to implement more elaborate and intelligent direction control schemes on varying configurations of wheeled mobile robot platforms.
* Final published version, hardcopy available from technical library of
NUST College of E&ME, Rawalpindi, Pakistan on request
View paper on