 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Algorithms for Convolutional Neural Networks
Nov 10, 2015
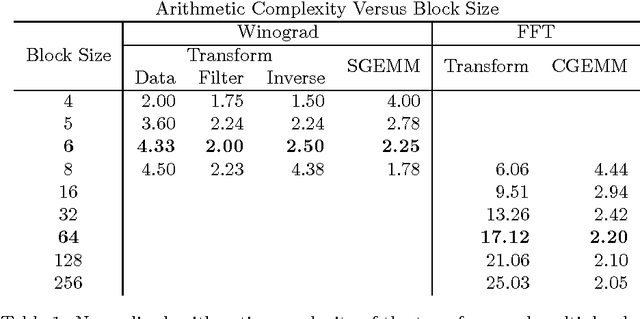
Deep convolutional neural networks take GPU days of compute time to train on large data sets. Pedestrian detection for self driving cars requires very low latency. Image recognition for mobile phones is constrained by limited processing resources. The success of convolutional neural networks in these situations is limited by how fast we can compute them. Conventional FFT based convolution is fast for large filters, but state of the art convolutional neural networks use small, 3x3 filters. We introduce a new class of fast algorithms for convolutional neural networks using Winograd's minimal filtering algorithms. The algorithms compute minimal complexity convolution over small tiles, which makes them fast with small filters and small batch sizes. We benchmark a GPU implementation of our algorithm with the VGG network and show state of the art throughput at batch sizes from 1 to 64.