 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Fluid Manipulation using Simplified Dynamics
Mar 08, 2016
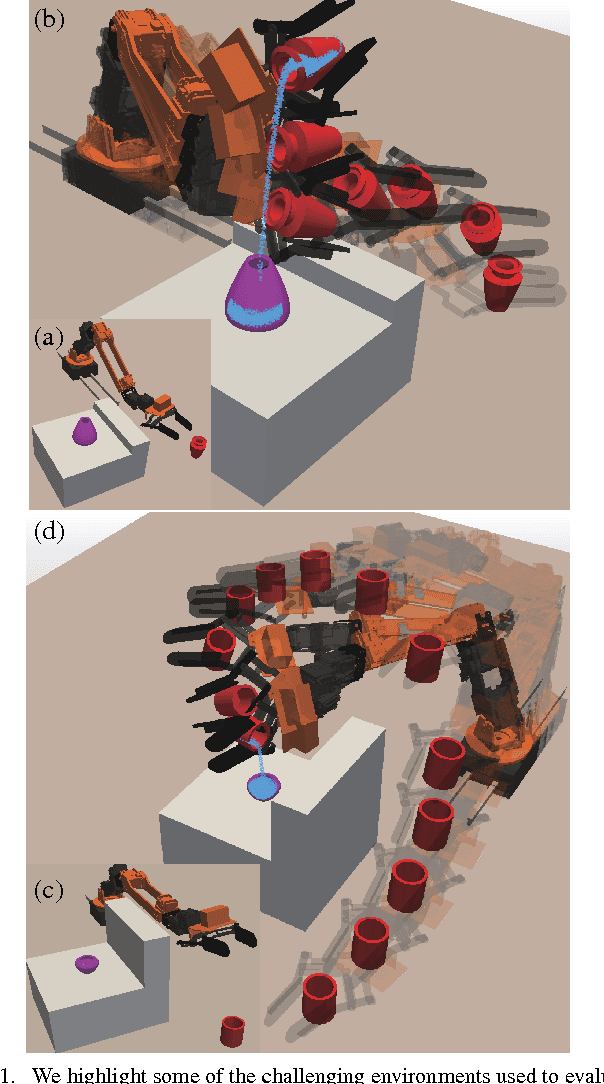
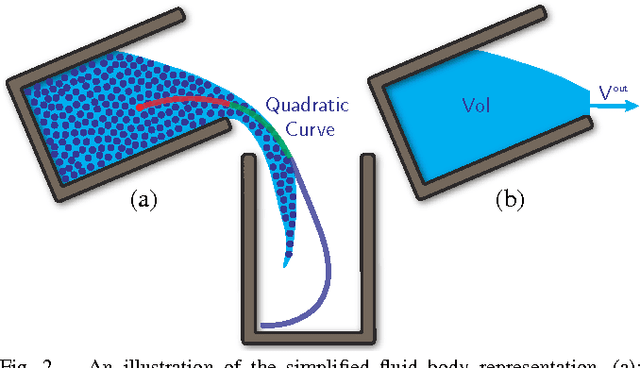
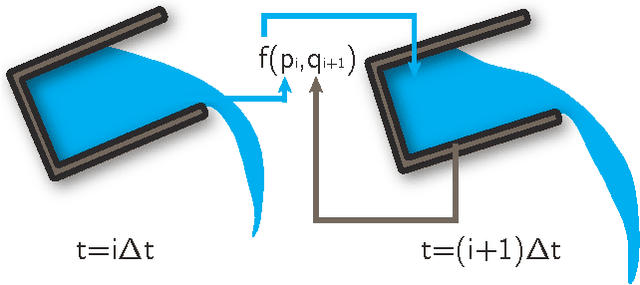
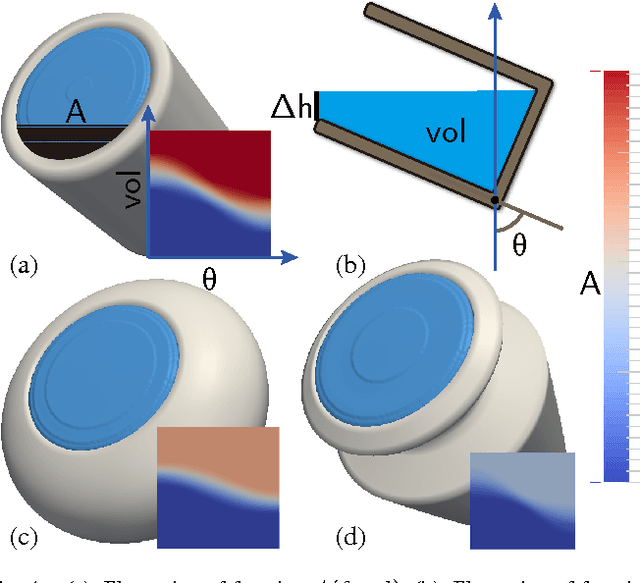
We present an optimization-based motion planning algorithm to compute a smooth, collision-free trajectory for a manipulator used to transfer a liquid from a source to a target container. We take into account fluid dynamics constraints as part of trajectory computation. In order to avoid the high complexity of exact fluid simulation, we introduce a simplified dynamics model based on physically inspired approximations and system identification. Our optimization approach can incorporate various other constraints such as collision avoidance with the obstacles, kinematic and dynamics constraints of the manipulator, and fluid dynamics characteristics. We demonstrate the performance of our planner on different benchmarks corresponding to various obstacles and container shapes. Furthermore, we also evaluate its accuracy by validating the motion plan using an accurate but computationally costly Navier-Stokes fluid simulation.