 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvexified Convolutional Neural Networks
Sep 04, 2016
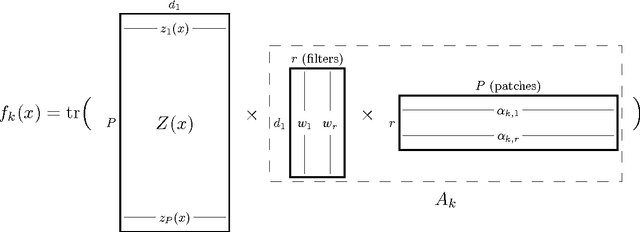
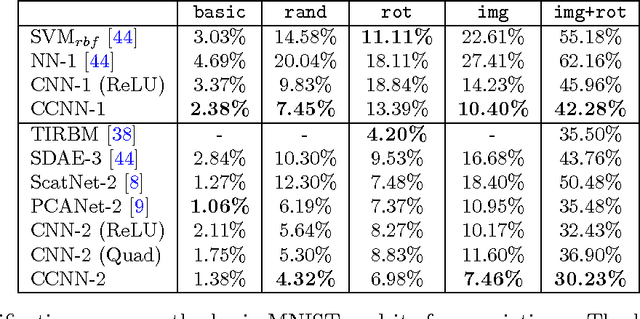
We describe the class of convexified convolutional neural networks (CCNNs), which capture the parameter sharing of convolutional neural networks in a convex manner. By representing the nonlinear convolutional filters as vectors in a reproducing kernel Hilbert space, the CNN parameters can be represented as a low-rank matrix, which can be relaxed to obtain a convex optimization problem. For learning two-layer convolutional neural networks, we prove that the generalization error obtained by a convexified CNN converges to that of the best possible CNN. For learning deeper networks, we train CCNNs in a layer-wise manner. Empirically, CCNNs achieve performance competitive with CNNs trained by backpropagation, SVMs, fully-connected neural networks, stacked denoising auto-encoders, and other baseline methods.