 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Motion Planning of Legged Robots: A Model Predictive Control Approach
Oct 11, 2017
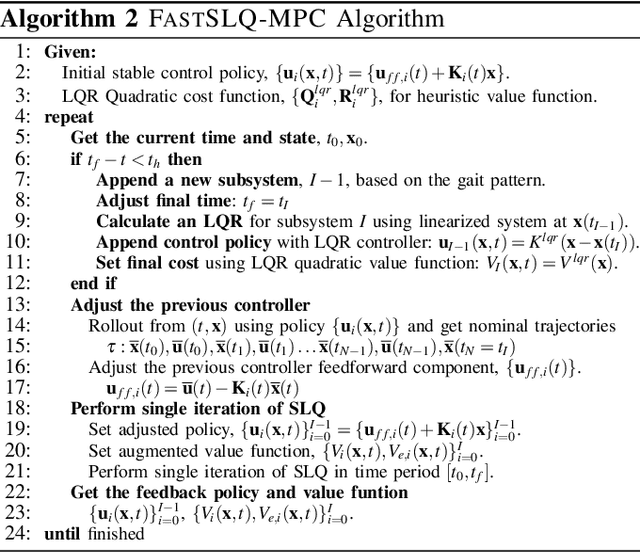
We introduce a real-time, constrained, nonlinear Model Predictive Control for the motion planning of legged robots. The proposed approach uses a constrained optimal control algorithm known as SLQ. We improve the efficiency of this algorithm by introducing a multi-processing scheme for estimating value function in its backward pass. This pass has been often calculated as a single process. This parallel SLQ algorithm can optimize longer time horizons without proportional increase in its computation time. Thus, our MPC algorithm can generate optimized trajectories for the next few phases of the motion within only a few milliseconds. This outperforms the state of the art by at least one order of magnitude. The performance of the approach is validated on a quadruped robot for generating dynamic gaits such as trotting.