 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximizing Road Capacity Using Cars that Influence People
Oct 09, 2018
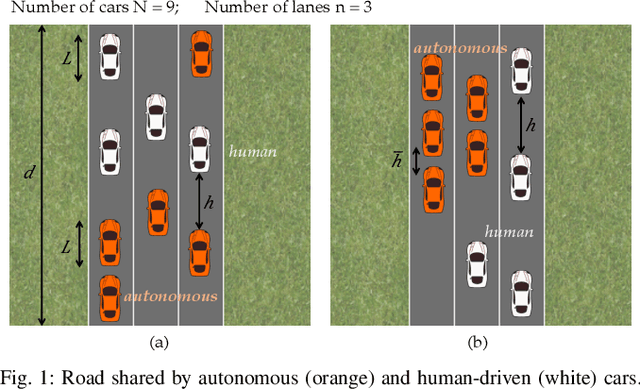
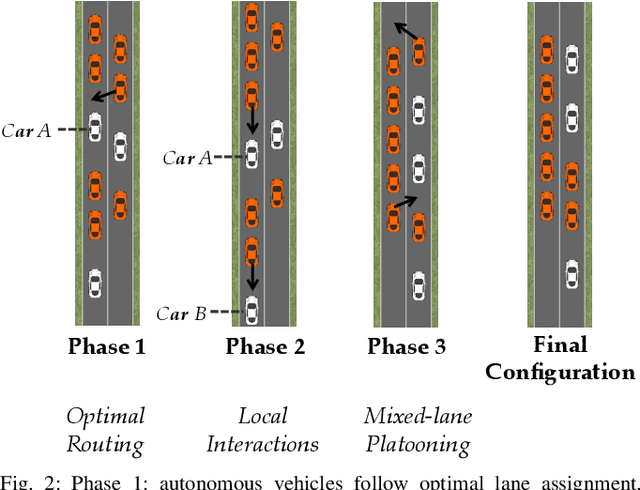
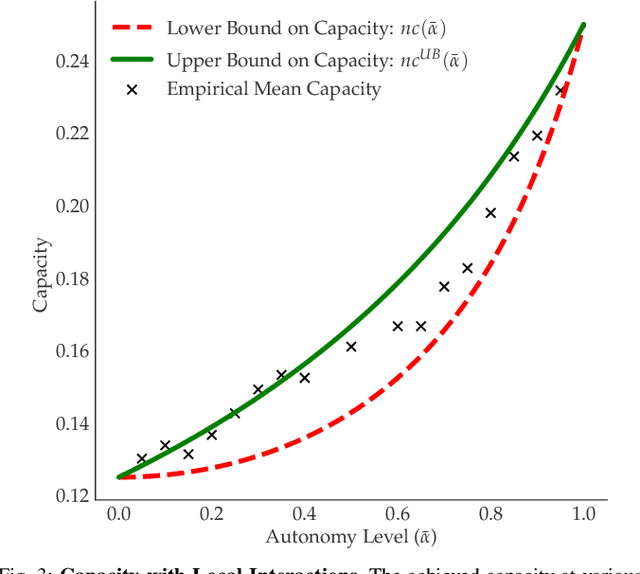
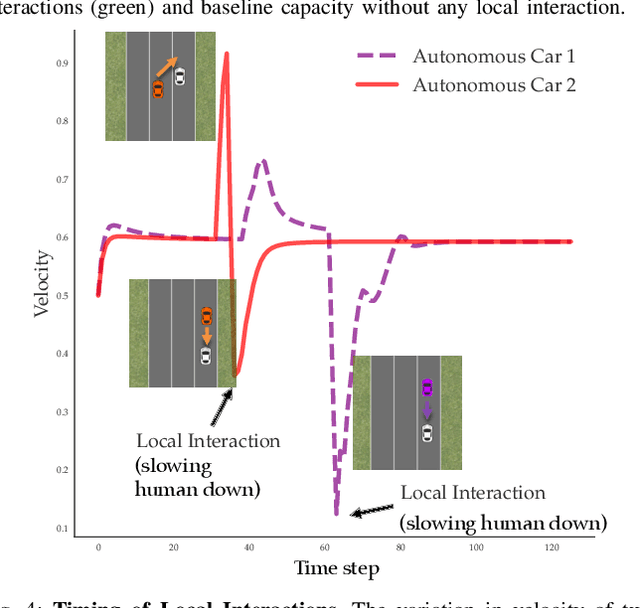
The emerging technology enabling autonomy in vehicles has led to a variety of new problems in transportation networks, such as planning and perception for autonomous vehicles. Other works consider social objectives such as decreasing fuel consumption and travel time by platooning. However, these strategies are limited by the actions of the surrounding human drivers. In this paper, we consider proactively achieving these social objectives by influencing human behavior through planned interactions. Our key insight is that we can use these social objectives to design local interactions that influence human behavior to achieve these goals. To this end, we characterize the increase in road capacity afforded by platooning, as well as the vehicle configuration that maximizes road capacity. We present a novel algorithm that uses a low-level control framework to leverage local interactions to optimally rearrange vehicles. We showcase our algorithm using a simulated road shared between autonomous and human-driven vehicles, in which we illustrate the reordering in action.