 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrafficPredict: Trajectory Prediction for Heterogeneous Traffic-Agents
Nov 06, 2018
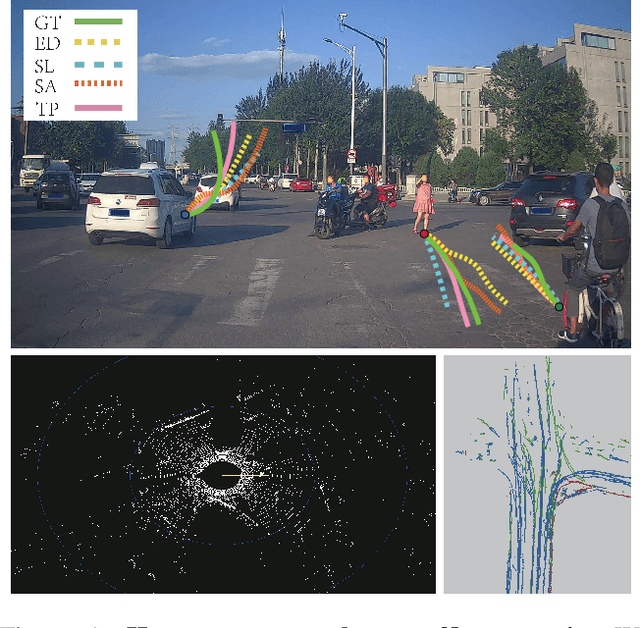
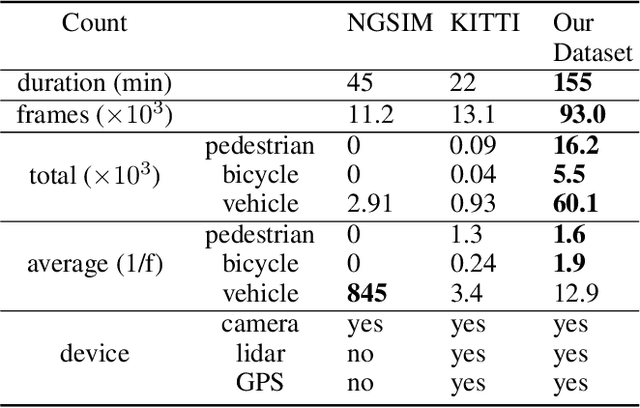
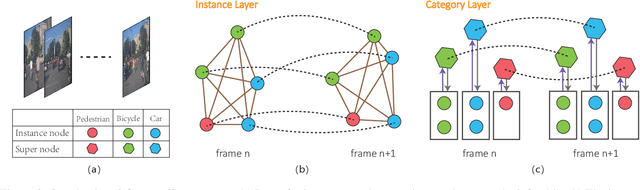
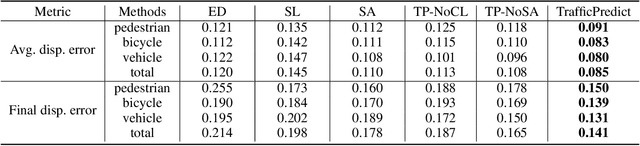
To safely and efficiently navigate in complex urban traffic, autonomous vehicles must make responsible predictions in relation to surrounding traffic-agents (vehicles, bicycles, pedestrians, etc.). A challenging and critical task is to explore the movement patterns of different traffic-agents and predict their future trajectories accurately to help the autonomous vehicle make reasonable navigation decision. To solve this problem, we propose a long short-term memory-based (LSTM-based) realtime traffic prediction algorithm, TrafficPredict. Our approach uses an instance layer to learn instances' movements and interactions and has a category layer to learn the similarities of instances belonging to the same type to refine the prediction. In order to evaluate its performance, we collected trajectory datasets in a large city consisting of varying conditions and traffic densities. The dataset includes many challenging scenarios where vehicles, bicycles, and pedestrians move among one another. We evaluate the performance of TrafficPredict on our new dataset and highlight its higher accuracy for trajectory prediction by comparing with prior prediction methods.