 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Predict Ego-Vehicle Poses for Sampling-Based Nonholonomic Motion Planning
Dec 03, 2018
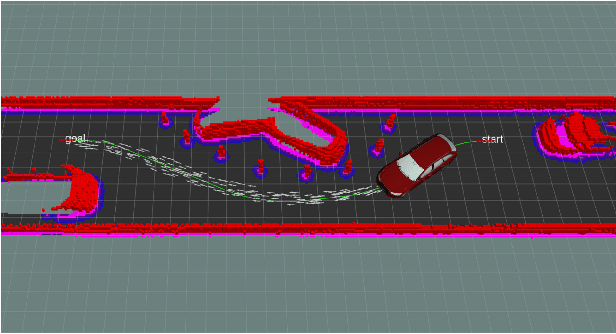
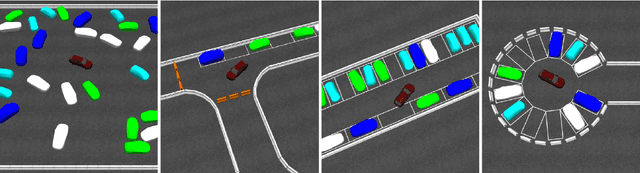
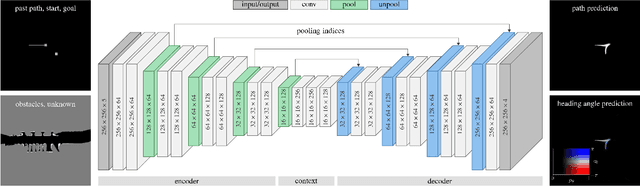
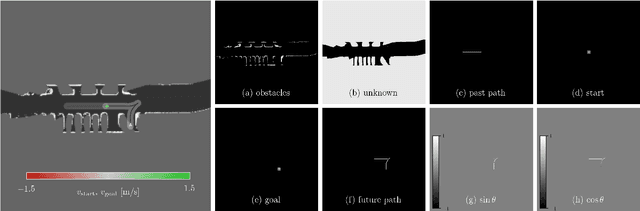
Sampling-based motion planning is an effective tool to compute safe trajectories for automated vehicles in complex environments. However, a fast convergence to the optimal solution can only be ensured with the use of problem-specific sampling distributions. Due to the large variety of driving situations within the context of automated driving, it is very challenging to manually design such distributions. This paper introduces therefore a data-driven approach utilizing a deep convolutional neural network (CNN): Given the current driving situation, future ego-vehicle poses can be directly generated from the output of the CNN allowing to guide the motion planner efficiently towards the optimal solution. A benchmark highlights that the CNN predicts future vehicle poses with a higher accuracy compared to uniform sampling and a state-of-the-art A*-based approach. Combining this CNN-guided sampling with the motion planner Bidirectional RRT* reduces the computation time by up to an order of magnitude and yields a faster convergence to a lower cost as well as a success rate of 100 % in the tested scenarios.