 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Consolidation for Continual Reinforcement Learning
Feb 01, 2019
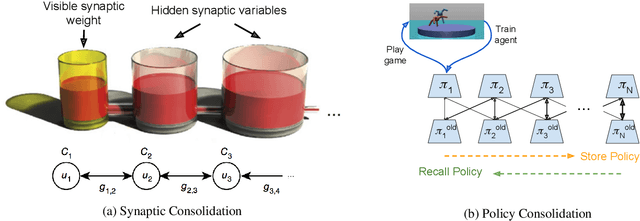
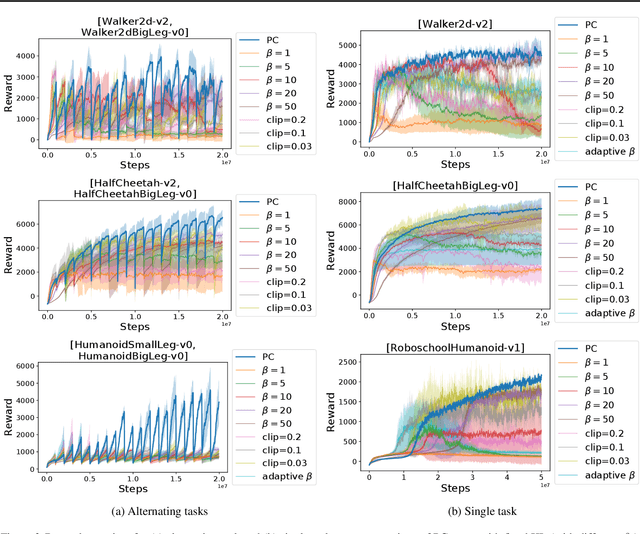
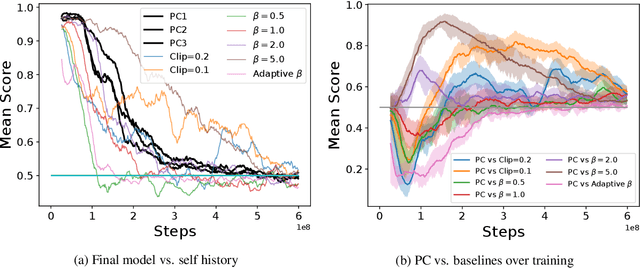
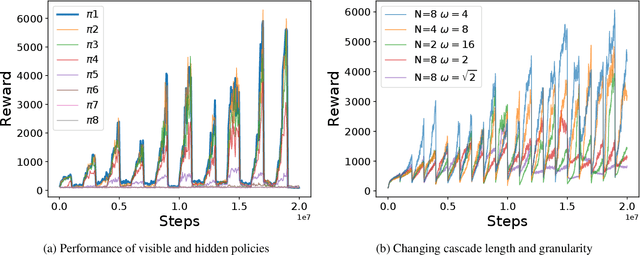
We propose a method for tackling catastrophic forgetting in deep reinforcement learning that is \textit{agnostic} to the timescale of changes in the distribution of experiences, does not require knowledge of task boundaries, and can adapt in \textit{continuously} changing environments. In our \textit{policy consolidation} model, the policy network interacts with a cascade of hidden networks that simultaneously remember the agent's policy at a range of timescales and regularise the current policy by its own history, thereby improving its ability to learn without forgetting. We find that the model improves continual learning relative to baselines on a number of continuous control tasks in single-task, alternating two-task, and multi-agent competitive self-play settings.