 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Navigation of Active Particles in an Unseen Environment via Deep Reinforcement Learning
Jun 26, 2019
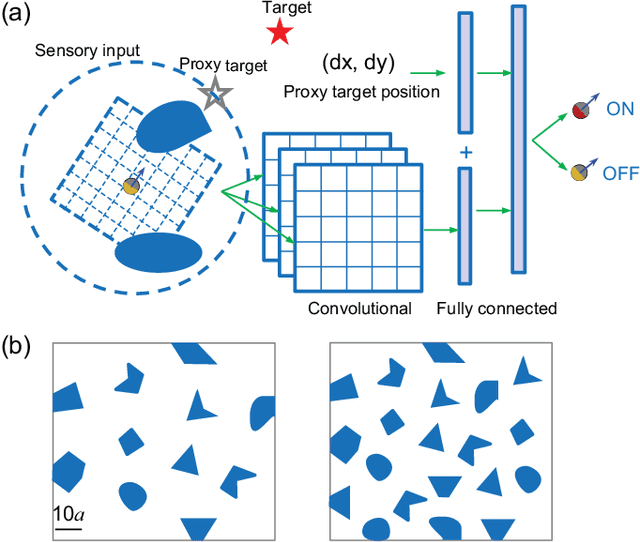
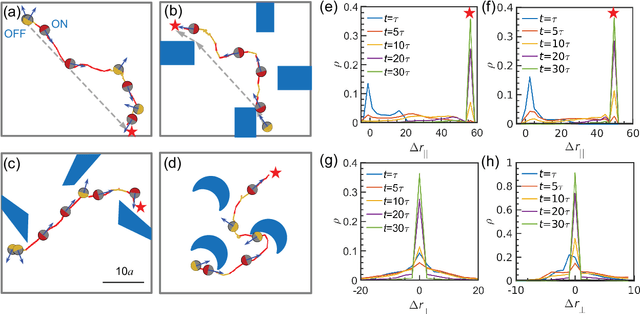
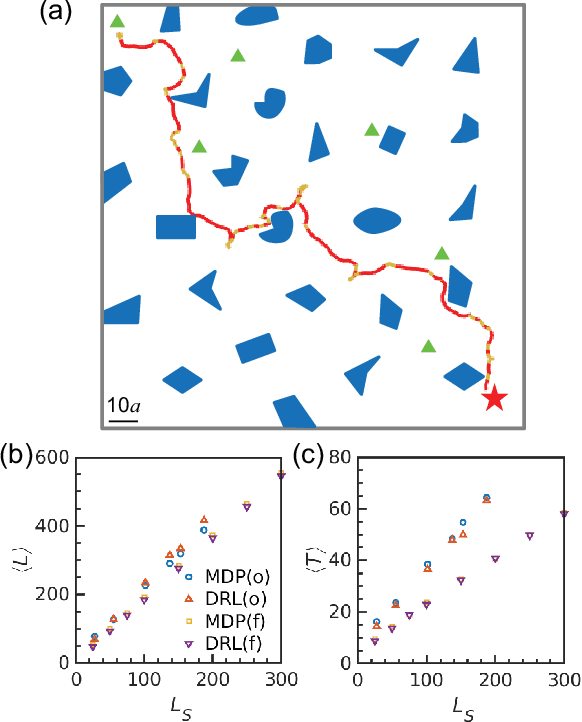
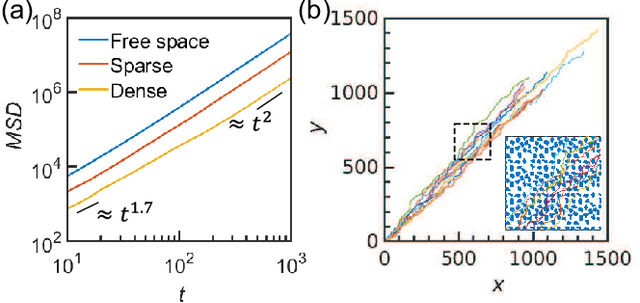
Equipping active particles with intelligence such that they can efficiently navigate in an unknown complex environment is essential for emerging applications like precision surgery and targeted drug delivery. Here we develop a deep reinforcement learning algorithm that can train active particles to navigate in environments with random obstacles. Through numerical experiments, we show that the trained particle agent learns to make navigation decision regarding both obstacle avoidance and travel time minimization, relying only on local pixel-level sensory inputs but not on pre-knowledge of the entire environment. In unseen complex obstacle environments, the trained particle agent can navigate nearly optimally in arbitrarily long distance nearly optimally at a fixed computational cost. This study illustrates the potentials of employing artificial intelligence to bridge the gap between active particle engineering and emerging real-world applications.