 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRIP: Graph-based Interaction-aware Trajectory Prediction
Jul 17, 2019
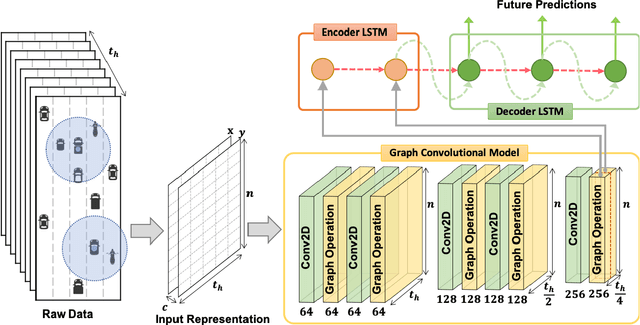
Nowadays, autonomous driving cars have become commercially available. However, the safety of a self-driving car is still a challenging problem that has not been well studied. Motion prediction is one of the core functions of an autonomous driving car. In this paper, we propose a novel scheme called GRIP which is designed to predict trajectories for traffic agents around an autonomous car efficiently. GRIP uses a graph to represent the interactions of close objects, applies several graph convolutional blocks to extract features, and subsequently uses an encoder-decoder long short-term memory (LSTM) model to make predictions. The experimental results on two well-known public datasets show that our proposed model improves the prediction accuracy of the state-of-the-art solution by 30%. The prediction error of GRIP is one meter shorter than existing schemes. Such an improvement can help autonomous driving cars avoid many traffic accidents. In addition, the proposed GRIP runs 5x faster than state-of-the-art schemes.