 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Context-aware Intrusion Detection System for Autonomous Cars
Aug 02, 2019
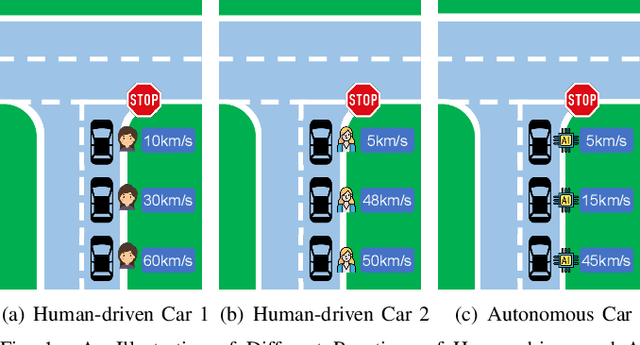
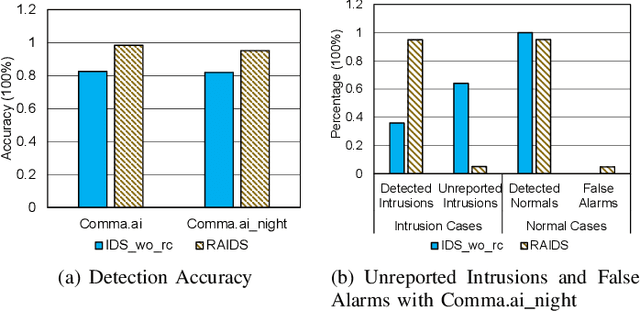
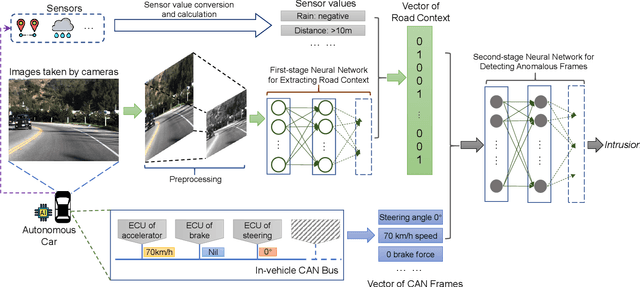
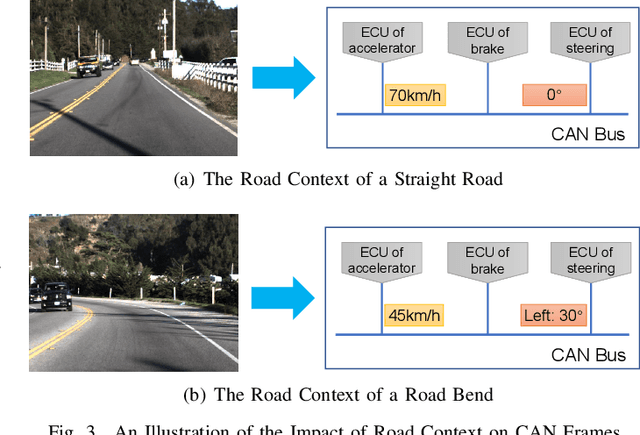
Security is of primary importance to vehicles. The viability of performing remote intrusions onto the in-vehicle network has been manifested. In regard to unmanned autonomous cars, limited work has been done to detect intrusions for them while existing intrusion detection systems (IDSs) embrace limitations against strong adversaries. In this paper, we consider the very nature of autonomous car and leverage the road context to build a novel IDS, named Road context-aware IDS (RAIDS). When a computer-controlled car is driving through continuous roads, road contexts and genuine frames transmitted on the car's in-vehicle network should resemble a regular and intelligible pattern. RAIDS hence employs a lightweight machine learning model to extract road contexts from sensory information (e.g., camera images and distance sensor values) that are used to generate control signals for maneuvering the car. With such ongoing road context, RAIDS validates corresponding frames observed on the in-vehicle network. Anomalous frames that substantially deviate from road context will be discerned as intrusions. We have implemented a prototype of RAIDS with neural networks, and conducted experiments on a Raspberry Pi with extensive datasets and meaningful intrusion cases. Evaluations show that RAIDS significantly outperforms state-of-the-art IDS without using road context by up to 99.9% accuracy and short response time.