 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDuckiefloat: a Collision-Tolerant Resource-Constrained Blimp for Long-Term Autonomy in Subterranean Environments
Oct 31, 2019
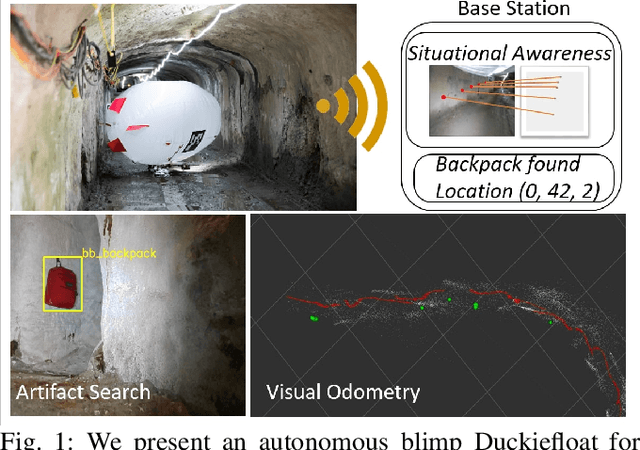
There are several challenges for search and rescue robots: mobility, perception, autonomy, and communication. Inspired by the DARPA Subterranean (SubT) Challenge, we propose an autonomous blimp robot, which has the advantages of low power consumption and collision-tolerance compared to other aerial vehicles like drones. This is important for search and rescue tasks that usually last for one or more hours. However, the underground constrained passages limit the size of blimp envelope and its payload, making the proposed system resource-constrained. Therefore, a careful design consideration is needed to build a blimp system with on-board artifact search and SLAM. In order to reach long-term operation, a failure-aware algorithm with minimal communication to human supervisor to have situational awareness and send control signals to the blimp when needed.