 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling and Control of A Novel Amphibious Robot with Dual-swing-legs Propulsion Mechanism
Sep 21, 2015
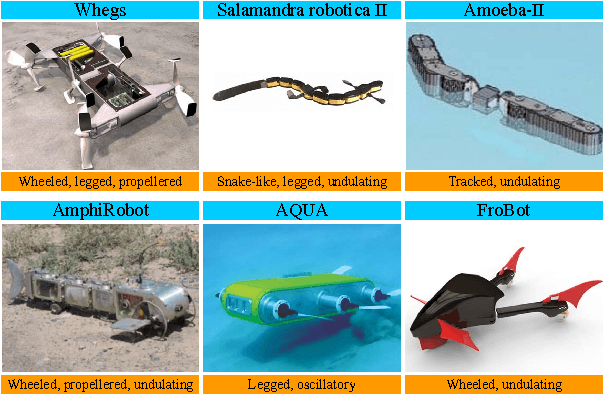
This paper describes a novel amphibious robot, which adopts a dual-swing-legs propulsion mechanism, proposing a new locomotion mode. The robot is called FroBot, since its structure and locomotion are similar to frogs. Our inspiration comes from the frog scooter and breaststroke. Based on its swing leg mechanism, an unusual universal wheel structure is used to generate propulsion on land, while a pair of flexible caudal fins functions like the foot flippers of a frog to generate similar propulsion underwater. On the basis of the prototype design and the dynamic model of the robot, some locomotion control simulations and experiments were conducted for the purpose of adjusting the parameters that affect the propulsion of the robot. Finally, a series of underwater experiments were performed to verify the design feasibility of FroBot and the rationality of the control algorithm.