Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback Motion Planning for Liquid Transfer using Supervised Learning
Feb 18, 2017
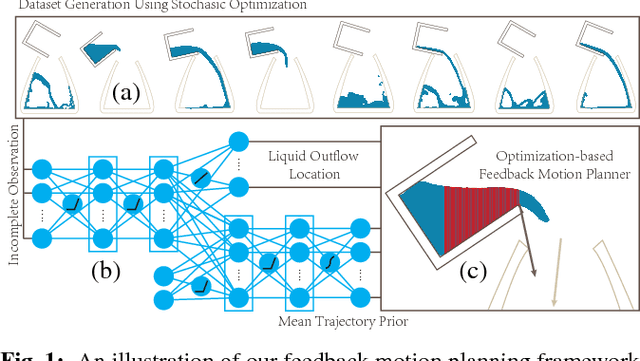
We present a novel motion planning algorithm for transferring a liquid body from a source to a target container. Our approach uses a receding-horizon optimization strategy that takes into account fluid constraints and avoids collisions. In order to efficiently handle the high-dimensional configuration space of a liquid body, we use system identification to learn its dynamics characteristics using a neural network. We generate the training dataset using stochastic optimization in a transfer-problem-specific search space. The runtime feedback motion planner is used for real-time planning and we observe high success rate in our simulated 2D and 3D fluid transfer benchmarks.
View paper on