 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeen There, Done That: Meta-Learning with Episodic Recall
Jul 06, 2018
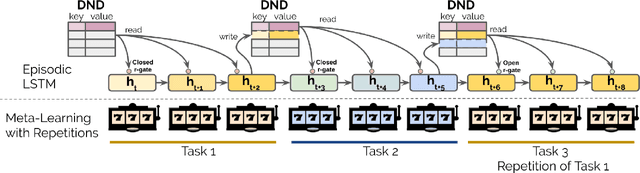
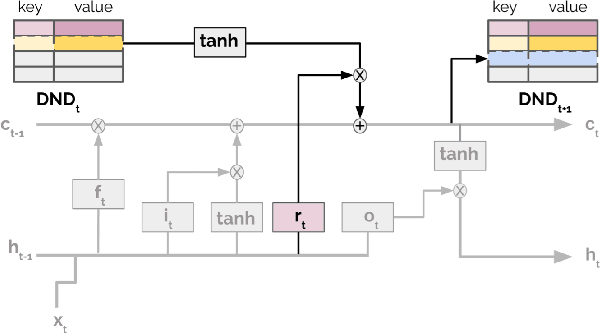
Meta-learning agents excel at rapidly learning new tasks from open-ended task distributions; yet, they forget what they learn about each task as soon as the next begins. When tasks reoccur - as they do in natural environments - metalearning agents must explore again instead of immediately exploiting previously discovered solutions. We propose a formalism for generating open-ended yet repetitious environments, then develop a meta-learning architecture for solving these environments. This architecture melds the standard LSTM working memory with a differentiable neural episodic memory. We explore the capabilities of agents with this episodic LSTM in five meta-learning environments with reoccurring tasks, ranging from bandits to navigation and stochastic sequential decision problems.