Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowdMove: Autonomous Mapless Navigation in Crowded Scenarios
Jul 25, 2018

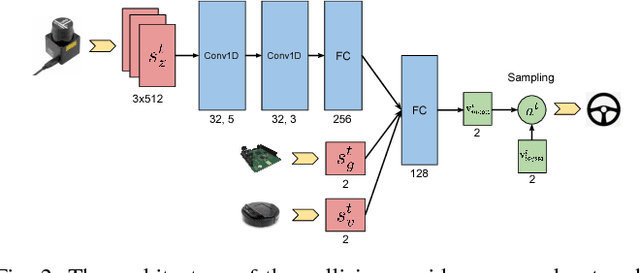
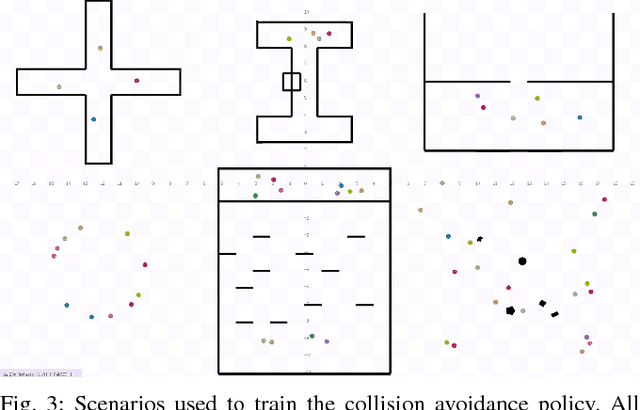
Navigation is an essential capability for mobile robots. In this paper, we propose a generalized yet effective 3M (i.e., multi-robot, multi-scenario, and multi-stage) training framework. We optimize a mapless navigation policy with a robust policy gradient algorithm. Our method enables different types of mobile platforms to navigate safely in complex and highly dynamic environments, such as pedestrian crowds. To demonstrate the superiority of our method, we test our methods with four kinds of mobile platforms in four scenarios. Videos are available at https://sites.google.com/view/crowdmove.
* arXiv admin note: text overlap with arXiv:1709.10082
View paper on