 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff-Policy Deep Reinforcement Learning without Exploration
Dec 07, 2018
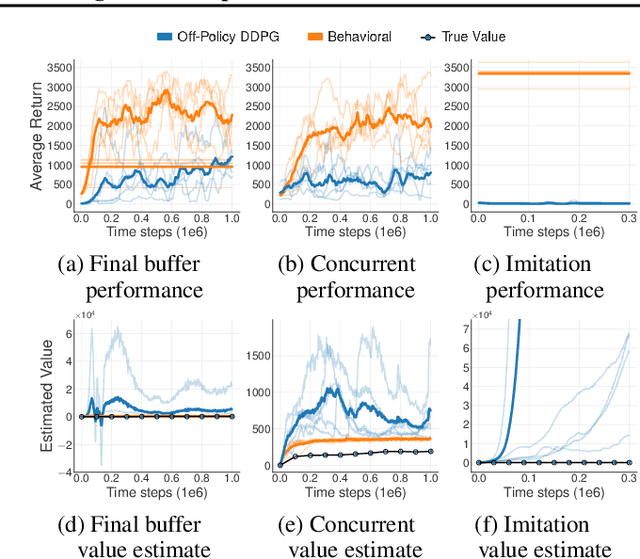
Reinforcement learning traditionally considers the task of balancing exploration and exploitation. This work examines batch reinforcement learning--the task of maximally exploiting a given batch of off-policy data, without further data collection. We demonstrate that due to errors introduced by extrapolation, standard off-policy deep reinforcement learning algorithms, such as DQN and DDPG, are only capable of learning with data correlated to their current policy, making them ineffective for most off-policy applications. We introduce a novel class of off-policy algorithms, batch-constrained reinforcement learning, which restricts the action space to force the agent towards behaving on-policy with respect to a subset of the given data. We extend this notion to deep reinforcement learning, and to the best of our knowledge, present the first continuous control deep reinforcement learning algorithm which can learn effectively from uncorrelated off-policy data.