 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Input-Output Linearizing Controllers for Bipedal Robots via Reinforcement Learning
May 02, 2020
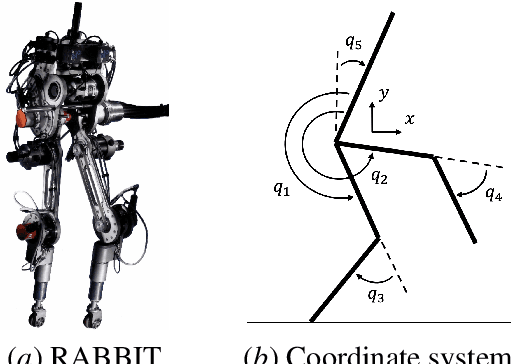
The main drawbacks of input-output linearizing controllers are the need for precise dynamics models and not being able to account for input constraints. Model uncertainty is common in almost every robotic application and input saturation is present in every real world system. In this paper, we address both challenges for the specific case of bipedal robot control by the use of reinforcement learning techniques. Taking the structure of a standard input-output linearizing controller, we use an additive learned term that compensates for model uncertainty. Moreover, by adding constraints to the learning problem we manage to boost the performance of the final controller when input limits are present. We demonstrate the effectiveness of the designed framework for different levels of uncertainty on the five-link planar walking robot RABBIT.