 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Neural Network Backstepping Control Method for Aerial Manipulator Based on Variable Inertia Parameter Modeling
Dec 08, 2022
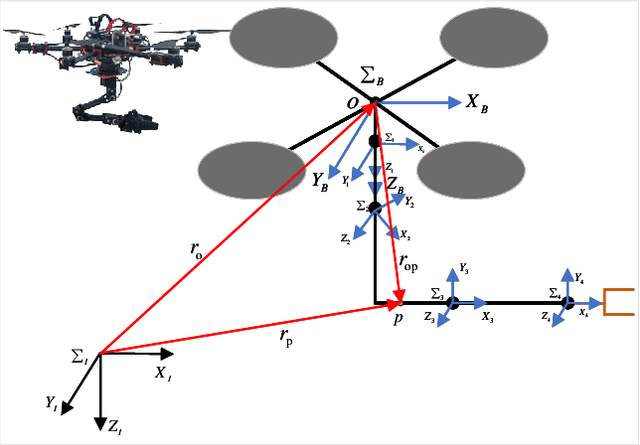
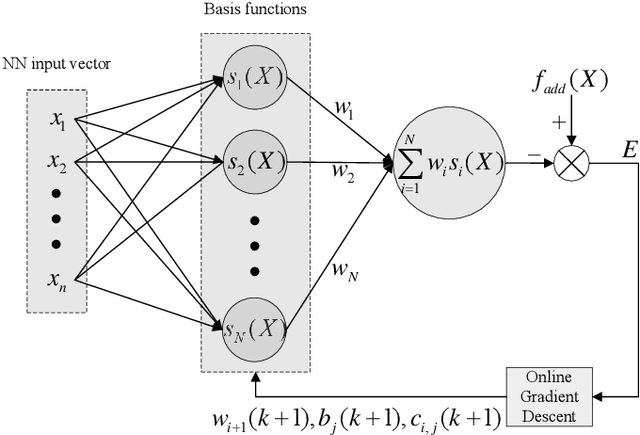
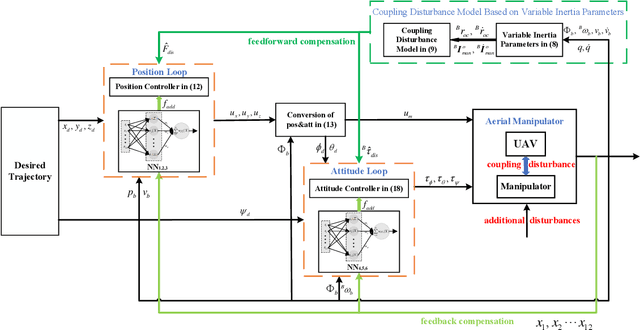
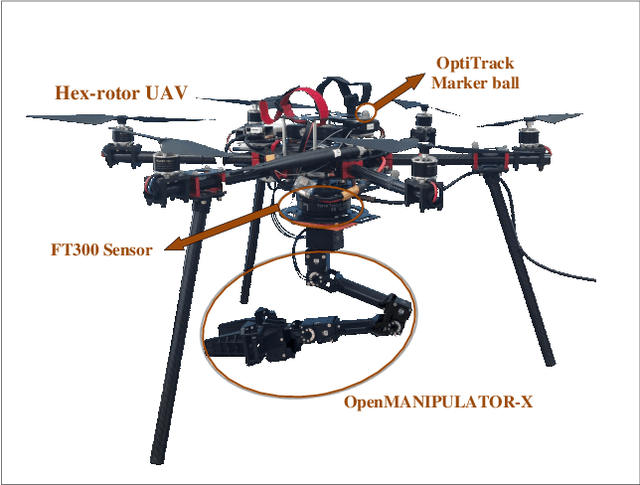
For the aerial manipulator that performs aerial work tasks, the actual operating environment it faces is very complex, and it is affected by internal and external multi-source disturbances. In this paper, to effectively improve the anti-disturbance control performance of the aerial manipulator, an adaptive neural network backstepping control method based on variable inertia parameter modeling is proposed. Firstly, for the intense internal coupling disturbance, we analyze and model it from the perspective of the generation mechanism of the coupling disturbance, and derive the dynamics model of the aerial manipulator system and the coupling disturbance model based on the variable inertia parameters. Through the proposed coupling disturbance model, we can compensate the strong coupling disturbance in a way of feedforward. Then, the adaptive neural network is proposed and applid to estimate and compensate the additional disturbances, and the closed-loop controller is designed based on the backstepping control method. Finally, we verify the correctness of the proposed coupling disturbance model through physical experiment under a large range motion of the manipulator. Two sets of comparative simulation results also prove the accurate estimation of the proposed adaptive neural network for additional disturbances and the effectiveness and superiority of the proposed control method.