 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHartwig Adam
VideoPrism: A Foundational Visual Encoder for Video Understanding
Feb 20, 2024
We introduce VideoPrism, a general-purpose video encoder that tackles diverse video understanding tasks with a single frozen model. We pretrain VideoPrism on a heterogeneous corpus containing 36M high-quality video-caption pairs and 582M video clips with noisy parallel text (e.g., ASR transcripts). The pretraining approach improves upon masked autoencoding by global-local distillation of semantic video embeddings and a token shuffling scheme, enabling VideoPrism to focus primarily on the video modality while leveraging the invaluable text associated with videos. We extensively test VideoPrism on four broad groups of video understanding tasks, from web video question answering to CV for science, achieving state-of-the-art performance on 30 out of 33 video understanding benchmarks.
Distilling Vision-Language Models on Millions of Videos
Jan 11, 2024The recent advance in vision-language models is largely attributed to the abundance of image-text data. We aim to replicate this success for video-language models, but there simply is not enough human-curated video-text data available. We thus resort to fine-tuning a video-language model from a strong image-language baseline with synthesized instructional data. The resulting video-language model is then used to auto-label millions of videos to generate high-quality captions. We show the adapted video-language model performs well on a wide range of video-language benchmarks. For instance, it surpasses the best prior result on open-ended NExT-QA by 2.8%. Besides, our model generates detailed descriptions for previously unseen videos, which provide better textual supervision than existing methods. Experiments show that a video-language dual-encoder model contrastively trained on these auto-generated captions is 3.8% better than the strongest baseline that also leverages vision-language models. Our best model outperforms state-of-the-art methods on MSR-VTT zero-shot text-to-video retrieval by 6%.
VideoPoet: A Large Language Model for Zero-Shot Video Generation
Dec 21, 2023We present VideoPoet, a language model capable of synthesizing high-quality video, with matching audio, from a large variety of conditioning signals. VideoPoet employs a decoder-only transformer architecture that processes multimodal inputs -- including images, videos, text, and audio. The training protocol follows that of Large Language Models (LLMs), consisting of two stages: pretraining and task-specific adaptation. During pretraining, VideoPoet incorporates a mixture of multimodal generative objectives within an autoregressive Transformer framework. The pretrained LLM serves as a foundation that can be adapted for a range of video generation tasks. We present empirical results demonstrating the model's state-of-the-art capabilities in zero-shot video generation, specifically highlighting VideoPoet's ability to generate high-fidelity motions. Project page: http://sites.research.google/videopoet/
PolyMaX: General Dense Prediction with Mask Transformer
Nov 09, 2023Dense prediction tasks, such as semantic segmentation, depth estimation, and surface normal prediction, can be easily formulated as per-pixel classification (discrete outputs) or regression (continuous outputs). This per-pixel prediction paradigm has remained popular due to the prevalence of fully convolutional networks. However, on the recent frontier of segmentation task, the community has been witnessing a shift of paradigm from per-pixel prediction to cluster-prediction with the emergence of transformer architectures, particularly the mask transformers, which directly predicts a label for a mask instead of a pixel. Despite this shift, methods based on the per-pixel prediction paradigm still dominate the benchmarks on the other dense prediction tasks that require continuous outputs, such as depth estimation and surface normal prediction. Motivated by the success of DORN and AdaBins in depth estimation, achieved by discretizing the continuous output space, we propose to generalize the cluster-prediction based method to general dense prediction tasks. This allows us to unify dense prediction tasks with the mask transformer framework. Remarkably, the resulting model PolyMaX demonstrates state-of-the-art performance on three benchmarks of NYUD-v2 dataset. We hope our simple yet effective design can inspire more research on exploiting mask transformers for more dense prediction tasks. Code and model will be made available.
SANPO: A Scene Understanding, Accessibility, Navigation, Pathfinding, Obstacle Avoidance Dataset
Sep 21, 2023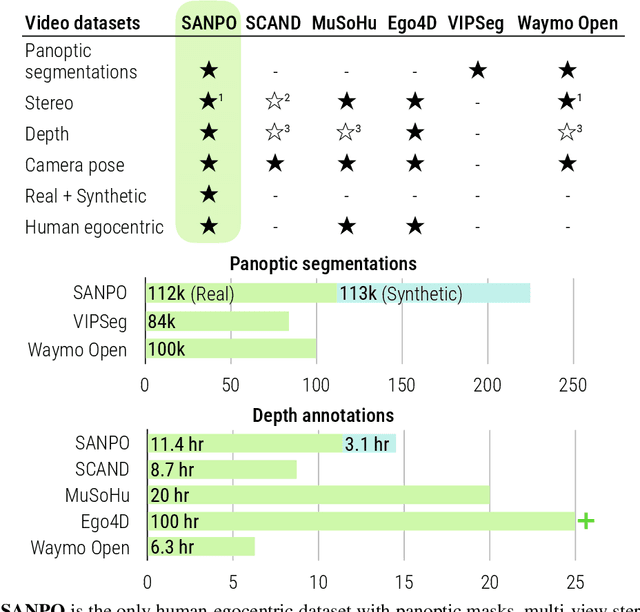
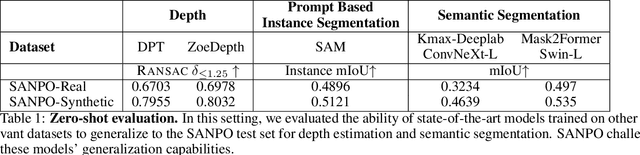
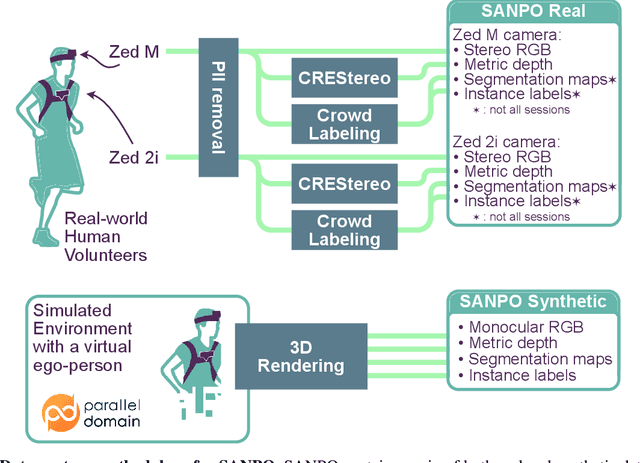
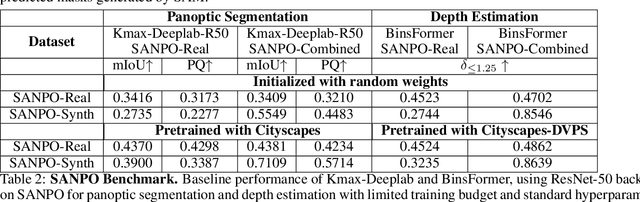
We introduce SANPO, a large-scale egocentric video dataset focused on dense prediction in outdoor environments. It contains stereo video sessions collected across diverse outdoor environments, as well as rendered synthetic video sessions. (Synthetic data was provided by Parallel Domain.) All sessions have (dense) depth and odometry labels. All synthetic sessions and a subset of real sessions have temporally consistent dense panoptic segmentation labels. To our knowledge, this is the first human egocentric video dataset with both large scale dense panoptic segmentation and depth annotations. In addition to the dataset we also provide zero-shot baselines and SANPO benchmarks for future research. We hope that the challenging nature of SANPO will help advance the state-of-the-art in video segmentation, depth estimation, multi-task visual modeling, and synthetic-to-real domain adaptation, while enabling human navigation systems. SANPO is available here: https://google-research-datasets.github.io/sanpo_dataset/
VideoGLUE: Video General Understanding Evaluation of Foundation Models
Jul 06, 2023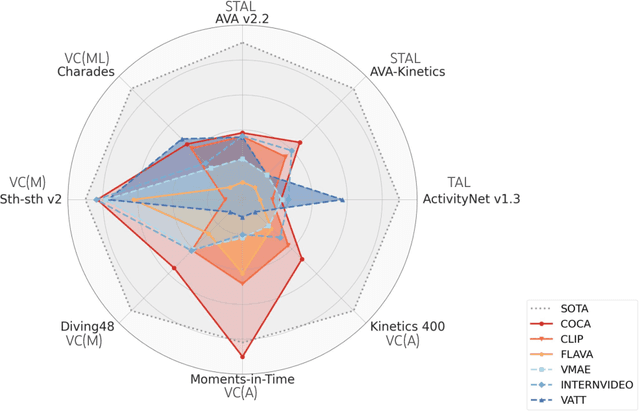
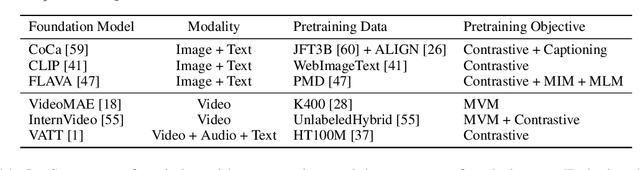
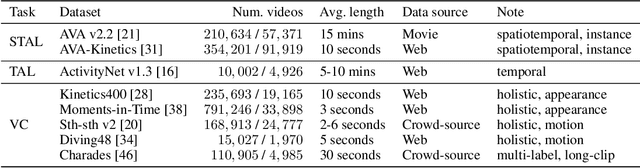
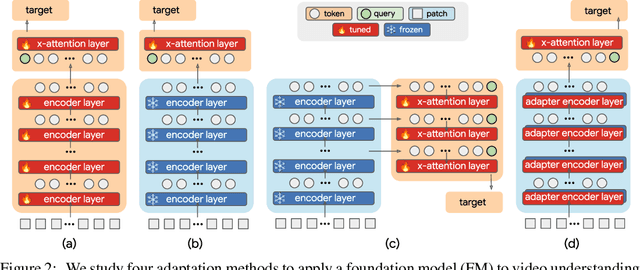
We evaluate existing foundation models video understanding capabilities using a carefully designed experiment protocol consisting of three hallmark tasks (action recognition, temporal localization, and spatiotemporal localization), eight datasets well received by the community, and four adaptation methods tailoring a foundation model (FM) for a downstream task. Moreover, we propose a scalar VideoGLUE score (VGS) to measure an FMs efficacy and efficiency when adapting to general video understanding tasks. Our main findings are as follows. First, task-specialized models significantly outperform the six FMs studied in this work, in sharp contrast to what FMs have achieved in natural language and image understanding. Second,video-native FMs, whose pretraining data contains the video modality, are generally better than image-native FMs in classifying motion-rich videos, localizing actions in time, and understanding a video of more than one action. Third, the video-native FMs can perform well on video tasks under light adaptations to downstream tasks(e.g., freezing the FM backbones), while image-native FMs win in full end-to-end finetuning. The first two observations reveal the need and tremendous opportunities to conduct research on video-focused FMs, and the last confirms that both tasks and adaptation methods matter when it comes to the evaluation of FMs.
Alternating Gradient Descent and Mixture-of-Experts for Integrated Multimodal Perception
May 10, 2023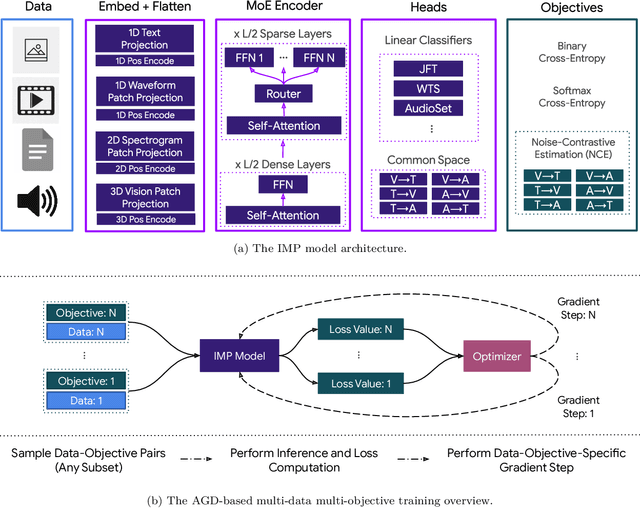

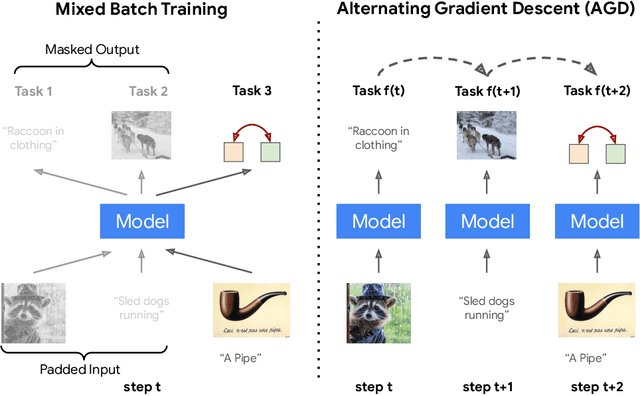
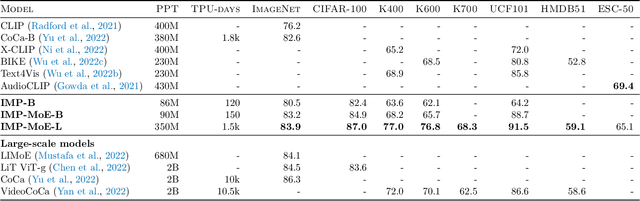
We present Integrated Multimodal Perception (IMP), a simple and scalable multimodal multi-task training and modeling approach. IMP integrates multimodal inputs including image, video, text, and audio into a single Transformer encoder with minimal modality-specific components. IMP makes use of a novel design that combines Alternating Gradient Descent (AGD) and Mixture-of-Experts (MoE) for efficient model \& task scaling. We conduct extensive empirical studies about IMP and reveal the following key insights: 1) performing gradient descent updates by alternating on diverse heterogeneous modalities, loss functions, and tasks, while also varying input resolutions, efficiently improves multimodal understanding. 2) model sparsification with MoE on a single modality-agnostic encoder substantially improves the performance, outperforming dense models that use modality-specific encoders or additional fusion layers and greatly mitigating the conflicts between modalities. IMP achieves competitive performance on a wide range of downstream tasks including image classification, video classification, image-text, and video-text retrieval. Most notably, we train a sparse IMP-MoE-L focusing on video tasks that achieves new state-of-the-art in zero-shot video classification. Our model achieves 77.0% on Kinetics-400, 76.8% on Kinetics-600, and 76.8% on Kinetics-700 zero-shot classification accuracy, improving the previous state-of-the-art by +5%, +6.7%, and +5.8%, respectively, while using only 15% of their total training computational cost.
Unified Visual Relationship Detection with Vision and Language Models
Mar 16, 2023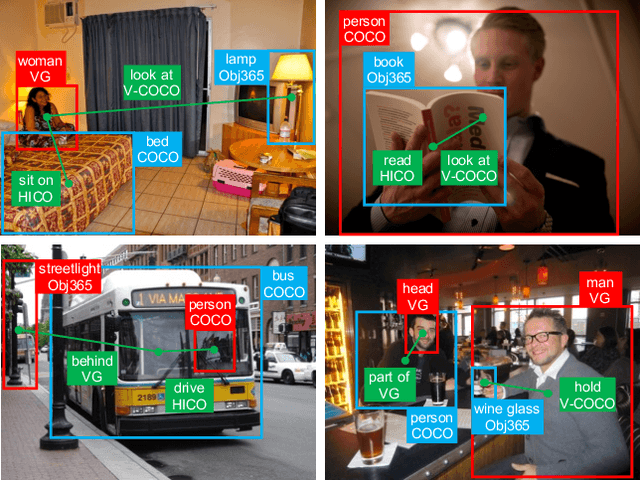
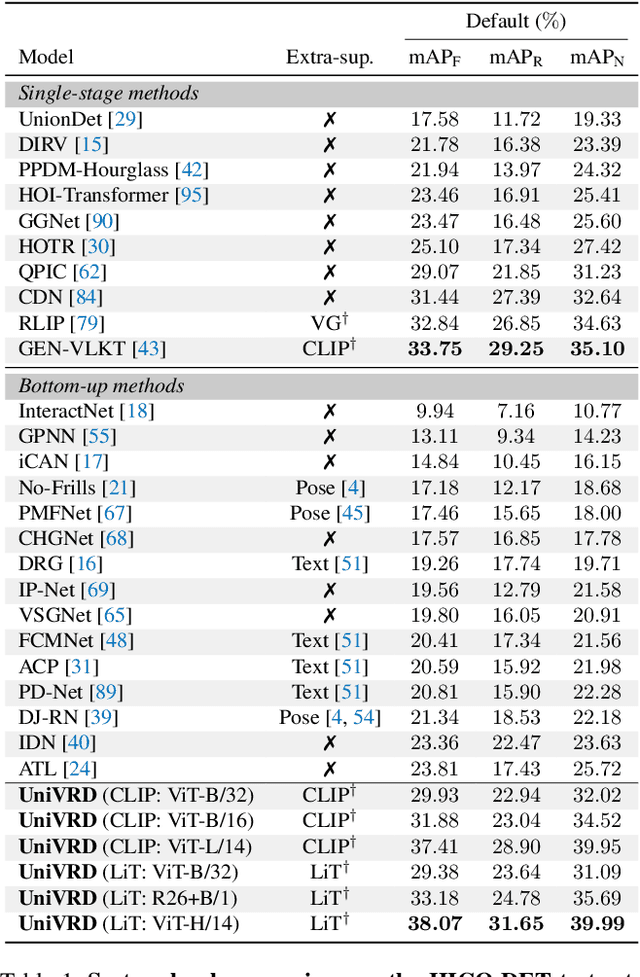
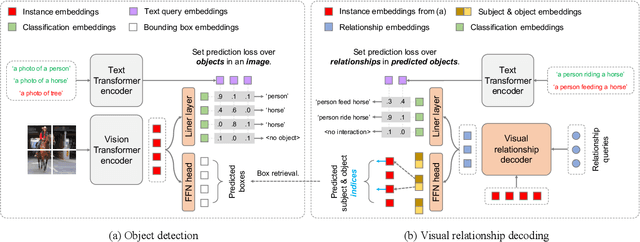
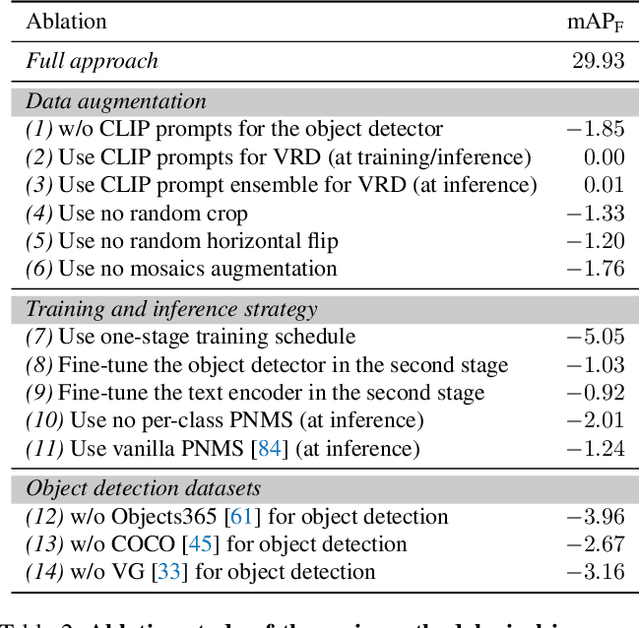
This work focuses on training a single visual relationship detector predicting over the union of label spaces from multiple datasets. Merging labels spanning different datasets could be challenging due to inconsistent taxonomies. The issue is exacerbated in visual relationship detection when second-order visual semantics are introduced between pairs of objects. To address this challenge, we propose UniVRD, a novel bottom-up method for Unified Visual Relationship Detection by leveraging vision and language models (VLMs). VLMs provide well-aligned image and text embeddings, where similar relationships are optimized to be close to each other for semantic unification. Our bottom-up design enables the model to enjoy the benefit of training with both object detection and visual relationship datasets. Empirical results on both human-object interaction detection and scene-graph generation demonstrate the competitive performance of our model. UniVRD achieves 38.07 mAP on HICO-DET, outperforming the current best bottom-up HOI detector by 60% relatively. More importantly, we show that our unified detector performs as well as dataset-specific models in mAP, and achieves further improvements when we scale up the model.
Improving Zero-shot Generalization and Robustness of Multi-modal Models
Dec 04, 2022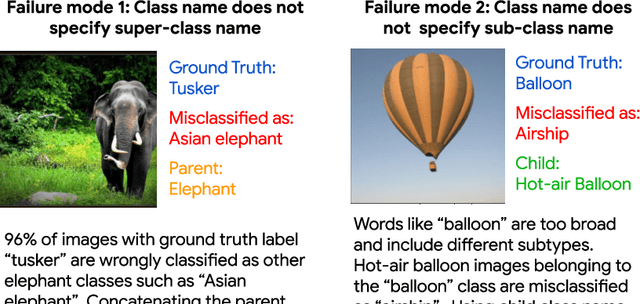
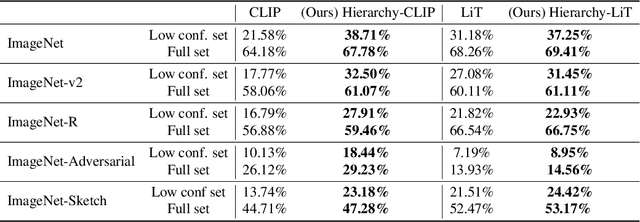
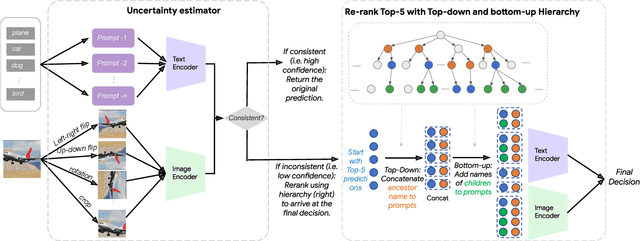
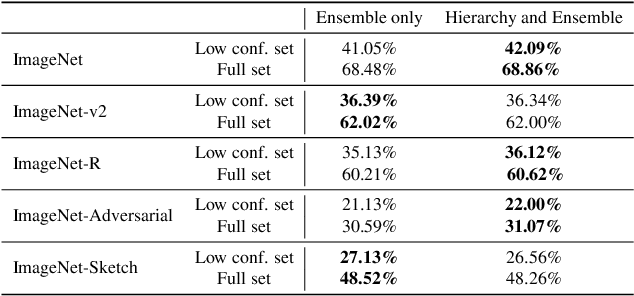
Multi-modal image-text models such as CLIP and LiT have demonstrated impressive performance on image classification benchmarks and their zero-shot generalization ability is particularly exciting. While the top-5 zero-shot accuracies of these models are very high, the top-1 accuracies are much lower (over 25% gap in some cases). We investigate the reasons for this performance gap and find that many of the failure cases are caused by ambiguity in the text prompts. First, we develop a simple and efficient zero-shot post-hoc method to identify images whose top-1 prediction is likely to be incorrect, by measuring consistency of the predictions w.r.t. multiple prompts and image transformations. We show that our procedure better predicts mistakes, outperforming the popular max logit baseline on selective prediction tasks. Next, we propose a simple and efficient way to improve accuracy on such uncertain images by making use of the WordNet hierarchy; specifically we augment the original class by incorporating its parent and children from the semantic label hierarchy, and plug the augmentation into text promts. We conduct experiments on both CLIP and LiT models with five different ImageNet-based datasets. For CLIP, our method improves the top-1 accuracy by 17.13% on the uncertain subset and 3.6% on the entire ImageNet validation set. We also show that our method improves across ImageNet shifted datasets and other model architectures such as LiT. Our proposed method is hyperparameter-free, requires no additional model training and can be easily scaled to other large multi-modal architectures.
MOAT: Alternating Mobile Convolution and Attention Brings Strong Vision Models
Oct 04, 2022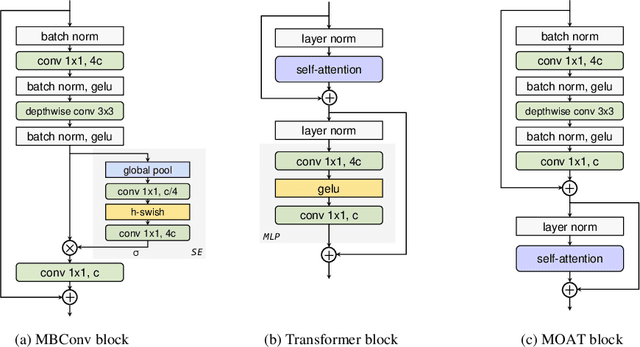

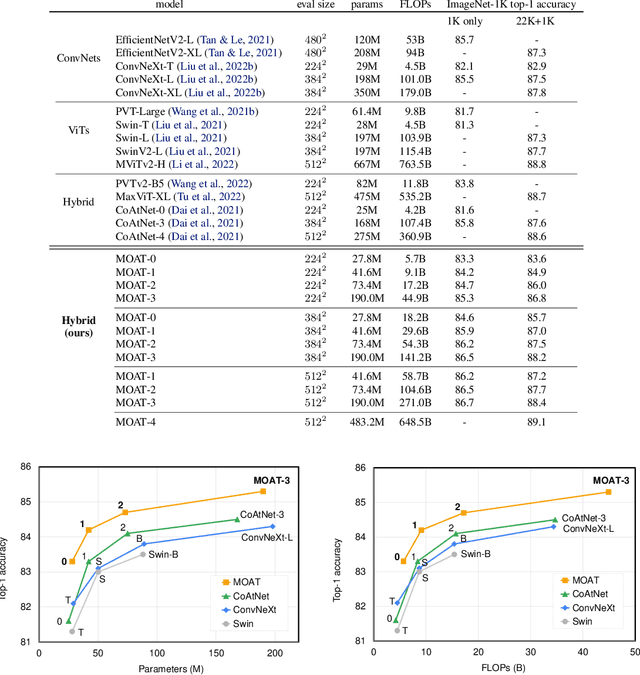
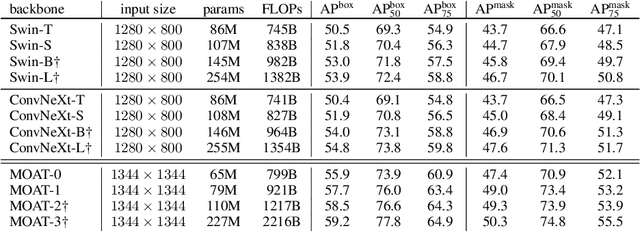
This paper presents MOAT, a family of neural networks that build on top of MObile convolution (i.e., inverted residual blocks) and ATtention. Unlike the current works that stack separate mobile convolution and transformer blocks, we effectively merge them into a MOAT block. Starting with a standard Transformer block, we replace its multi-layer perceptron with a mobile convolution block, and further reorder it before the self-attention operation. The mobile convolution block not only enhances the network representation capacity, but also produces better downsampled features. Our conceptually simple MOAT networks are surprisingly effective, achieving 89.1% top-1 accuracy on ImageNet-1K with ImageNet-22K pretraining. Additionally, MOAT can be seamlessly applied to downstream tasks that require large resolution inputs by simply converting the global attention to window attention. Thanks to the mobile convolution that effectively exchanges local information between pixels (and thus cross-windows), MOAT does not need the extra window-shifting mechanism. As a result, on COCO object detection, MOAT achieves 59.2% box AP with 227M model parameters (single-scale inference, and hard NMS), and on ADE20K semantic segmentation, MOAT attains 57.6% mIoU with 496M model parameters (single-scale inference). Finally, the tiny-MOAT family, obtained by simply reducing the channel sizes, also surprisingly outperforms several mobile-specific transformer-based models on ImageNet. We hope our simple yet effective MOAT will inspire more seamless integration of convolution and self-attention. Code is made publicly available.