 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbdalla Swikir
Learning Barrier-Certified Polynomial Dynamical Systems for Obstacle Avoidance with Robots
Mar 13, 2024
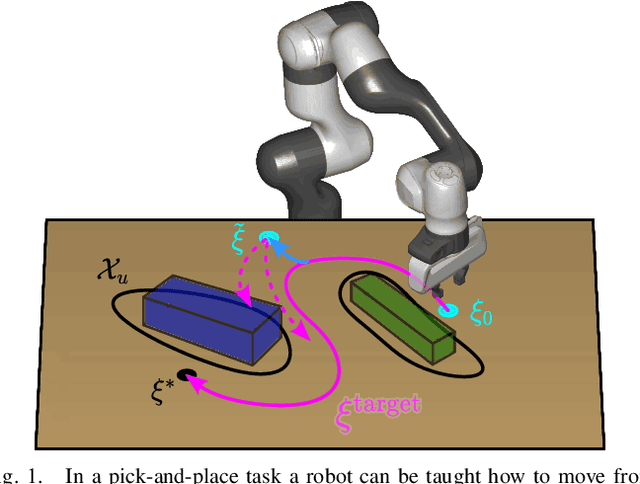
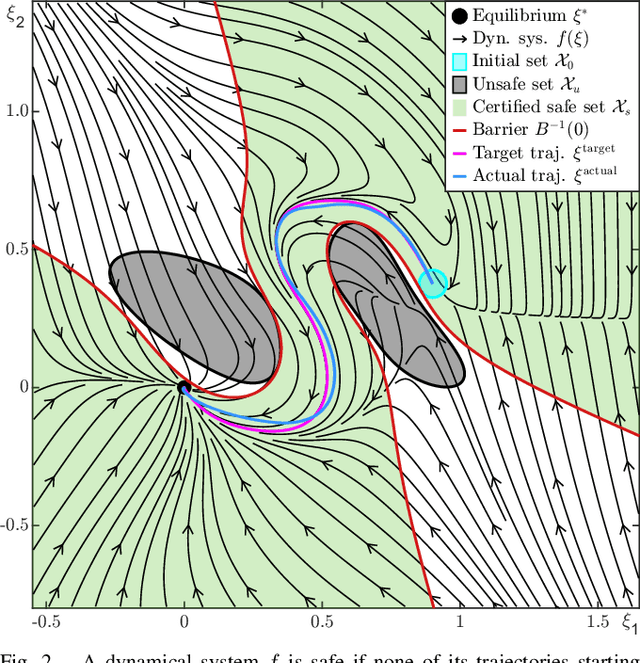
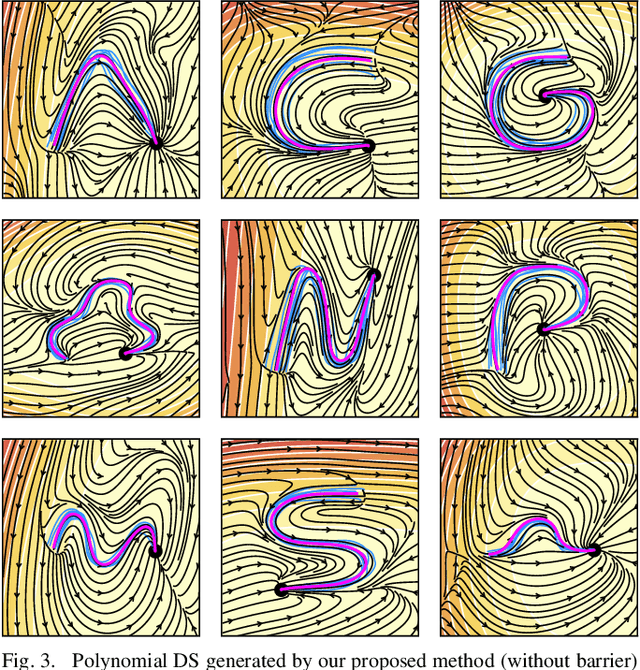
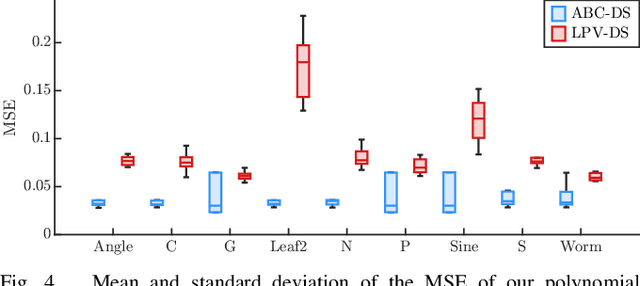
Established techniques that enable robots to learn from demonstrations are based on learning a stable dynamical system (DS). To increase the robots' resilience to perturbations during tasks that involve static obstacle avoidance, we propose incorporating barrier certificates into an optimization problem to learn a stable and barrier-certified DS. Such optimization problem can be very complex or extremely conservative when the traditional linear parameter-varying formulation is used. Thus, different from previous approaches in the literature, we propose to use polynomial representations for DSs, which yields an optimization problem that can be tackled by sum-of-squares techniques. Finally, our approach can handle obstacle shapes that fall outside the scope of assumptions typically found in the literature concerning obstacle avoidance within the DS learning framework. Supplementary material can be found at the project webpage: https://martinschonger.github.io/abc-ds
Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
Sep 14, 2023



Elastic actuation taps into elastic elements' energy storage for dynamic motions beyond rigid actuation. While Series Elastic Actuators (SEA) and Variable Stiffness Actuators (VSA) are highly sophisticated, they do not fully provide control over energy transfer timing. To overcome this problem on the basic system level, the Bi-Stiffness Actuation (BSA) concept was recently proposed. Theoretically, it allows for full link decoupling, while simultaneously being able to lock the spring in the drive train via a switch-and-hold mechanism. Thus, the user would be in full control of the potential energy storage and release timing. In this work, we introduce an initial proof-of-concept of Bi-Stiffness-Actuation in the form of a 1-DoF physical prototype, which is implemented using a modular testbed. We present a hybrid system model, as well as the mechatronic implementation of the actuator. We corroborate the feasibility of the concept by conducting a series of hardware experiments using an open-loop control signal obtained by trajectory optimization. Here, we compare the performance of the prototype with a comparable SEA implementation. We show that BSA outperforms SEA 1) in terms of maximum velocity at low final times and 2) in terms of the movement strategy itself: The clutch mechanism allows the BSA to generate consistent launch sequences while the SEA has to rely on lengthy and possibly dangerous oscillatory swing-up motions. Furthermore, we demonstrate that providing full control authority over the energy transfer timing and link decoupling allows the user to synchronously release both elastic joint and gravitational energy. This facilitates the optimal exploitation of elastic and gravitational potentials in a synergistic manner.
Towards Connecting Control to Perception: High-Performance Whole-Body Collision Avoidance Using Control-Compatible Obstacles
Sep 13, 2023One of the most important aspects of autonomous systems is safety. This includes ensuring safe human-robot and safe robot-environment interaction when autonomously performing complex tasks or in collaborative scenarios. Although several methods have been introduced to tackle this, most are unsuitable for real-time applications and require carefully hand-crafted obstacle descriptions. In this work, we propose a method combining high-frequency and real-time self and environment collision avoidance of a robotic manipulator with low-frequency, multimodal, and high-resolution environmental perceptions accumulated in a digital twin system. Our method is based on geometric primitives, so-called primitive skeletons. These, in turn, are information-compressed and real-time compatible digital representations of the robot's body and environment, automatically generated from ultra-realistic virtual replicas of the real world provided by the digital twin. Our approach is a key enabler for closing the loop between environment perception and robot control by providing the millisecond real-time control stage with a current and accurate world description, empowering it to react to environmental changes. We evaluate our whole-body collision avoidance on a 9-DOFs robot system through five experiments, demonstrating the functionality and efficiency of our framework.
Fast yet predictable braking manoeuvers for real-time robot control
Jun 10, 2023



This paper proposes a framework for generating fast, smooth and predictable braking manoeuvers for a controlled robot. The proposed framework integrates two approaches to obtain feasible modal limits for designing braking trajectories. The first approach is real-time capable but conservative considering the usage of the available feasible actuator control region, resulting in longer braking times. In contrast, the second approach maximizes the used braking control inputs at the cost of requiring more time to evaluate larger, feasible modal limits via optimization. Both approaches allow for predicting the robot's stopping trajectory online. In addition, we also formulated and solved a constrained, nonlinear final-time minimization problem to find optimal torque inputs. The optimal solutions were used as a benchmark to evaluate the performance of the proposed predictable braking framework. A comparative study was compiled in simulation versus a classical optimal controller on a 7-DoF robot arm with only three moving joints. The results verified the effectiveness of our proposed framework and its integrated approaches in achieving fast robot braking manoeuvers with accurate online predictions of the stopping trajectories and distances under various braking settings.
Learning optimal controllers: a dynamical motion primitive approach
Jun 10, 2023Real-time computation of optimal control is a challenging problem and, to solve this difficulty, many frameworks proposed to use learning techniques to learn (possibly sub-optimal) controllers and enable their usage in an online fashion. Among these techniques, the optimal motion framework is a simple, yet powerful technique, that obtained success in many complex real-world applications. The main idea of this approach is to take advantage of dynamic motion primitives, a widely used tool in robotics to learn trajectories from demonstrations. While usually these demonstrations come from humans, the optimal motion framework is based on demonstrations coming from optimal solutions, such as the ones obtained by numeric solvers. As usual in many learning techniques, a drawback of this approach is that it is hard to estimate the suboptimality of learned solutions, since finding easily computable and non-trivial upper bounds to the error between an optimal solution and a learned solution is, in general, unfeasible. However, we show in this paper that it is possible to estimate this error for a broad class of problems. Furthermore, we apply this estimation technique to achieve a novel and more efficient sampling scheme to be used within the optimal motion framework, enabling the usage of this framework in some scenarios where the computational resources are limited.
BSA -- Bi-Stiffness Actuation for optimally exploiting intrinsic compliance and inertial coupling effects in elastic joint robots
Dec 30, 2022



Compliance in actuation has been exploited to generate highly dynamic maneuvers such as throwing that take advantage of the potential energy stored in joint springs. However, the energy storage and release could not be well-timed yet. On the contrary, for multi-link systems, the natural system dynamics might even work against the actual goal. With the introduction of variable stiffness actuators, this problem has been partially addressed. With a suitable optimal control strategy, the approximate decoupling of the motor from the link can be achieved to maximize the energy transfer into the distal link prior to launch. However, such continuous stiffness variation is complex and typically leads to oscillatory swing-up motions instead of clear launch sequences. To circumvent this issue, we investigate decoupling for speed maximization with a dedicated novel actuator concept denoted Bi-Stiffness Actuation. With this, it is possible to fully decouple the link from the joint mechanism by a switch-and-hold clutch and simultaneously keep the elastic energy stored. We show that with this novel paradigm, it is not only possible to reach the same optimal performance as with power-equivalent variable stiffness actuation, but even directly control the energy transfer timing. This is a major step forward compared to previous optimal control approaches, which rely on optimizing the full time-series control input.
* Accepted version of article that has been published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Towards Task-Specific Modular Gripper Fingers: Automatic Production of Fingertip Mechanics
Oct 18, 2022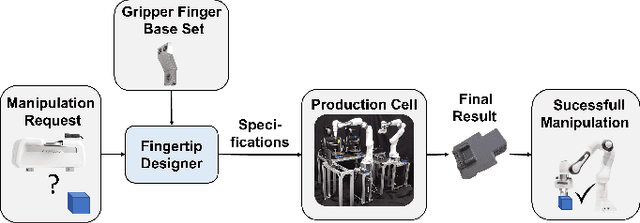
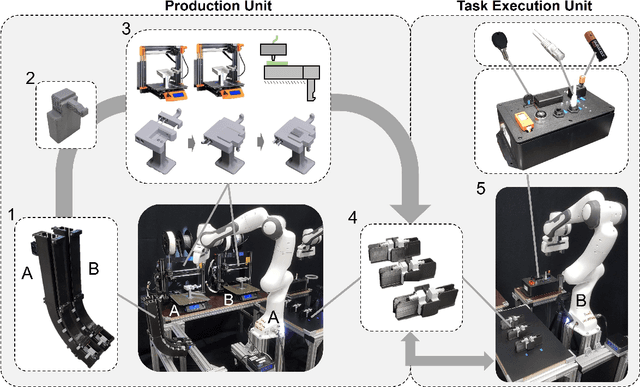
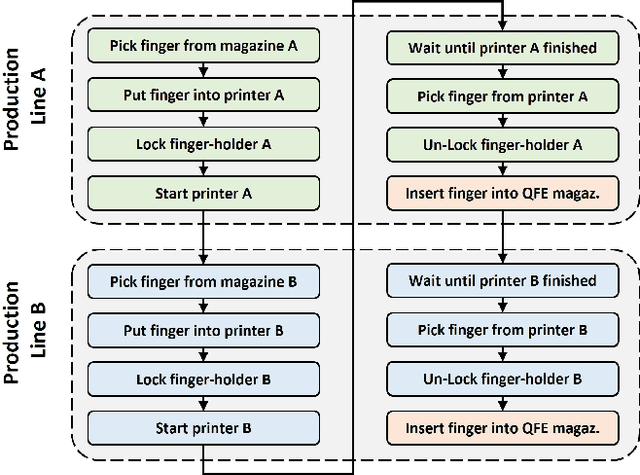
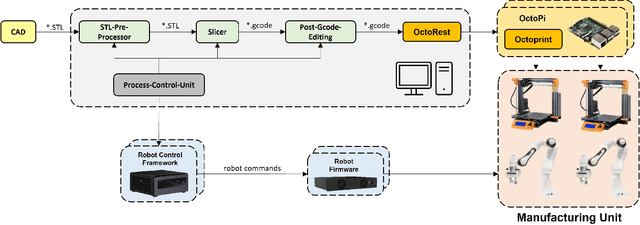
The number of sequential tasks a single gripper can perform is significantly limited by its design. In many cases, changing the gripper fingers is required to successfully conduct multiple consecutive tasks. For this reason, several robotic tool change systems have been introduced that allow an automatic changing of the entire end-effector. However, many situations require only the modification or the change of the fingertip, making the exchange of the entire gripper uneconomic. In this paper, we introduce a paradigm for automatic task-specific fingertip production. The setup used in the proposed framework consists of a production and task execution unit, containing a robotic manipulator, and two 3D printers - autonomously producing the gripper fingers. It also consists of a second manipulator that uses a quick-exchange mechanism to pick up the printed fingertips and evaluates gripping performance. The setup is experimentally validated by conducting automatic production of three different fingertips and executing graspstability tests as well as multiple pick- and insertion tasks, with and without position offsets - using these fingertips. The proposed paradigm, indeed, goes beyond fingertip production and serves as a foundation for a fully automatic fingertip design, production and application pipeline - potentially improving manufacturing flexibility and representing a new production paradigm: tactile 3D manufacturing.