 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAishwarya Mandyam
Adaptive Interventions with User-Defined Goals for Health Behavior Change
Nov 16, 2023
Physical inactivity remains a major public health concern, having associations with adverse health outcomes such as cardiovascular disease and type-2 diabetes. Mobile health applications present a promising avenue for low-cost, scalable physical activity promotion, yet often suffer from small effect sizes and low adherence rates, particularly in comparison to human coaching. Goal-setting is a critical component of health coaching that has been underutilized in adaptive algorithms for mobile health interventions. This paper introduces a modification to the Thompson sampling algorithm that places emphasis on individualized goal-setting by optimizing personalized reward functions. As a step towards supporting goal-setting, this paper offers a balanced approach that can leverage shared structure while optimizing individual preferences and goals. We prove that our modification incurs only a constant penalty on the cumulative regret while preserving the sample complexity benefits of data sharing. In a physical activity simulator, we demonstrate that our algorithm achieves substantial improvements in cumulative regret compared to baselines that do not share data or do not optimize for individualized rewards.
Kernel Density Bayesian Inverse Reinforcement Learning
Mar 13, 2023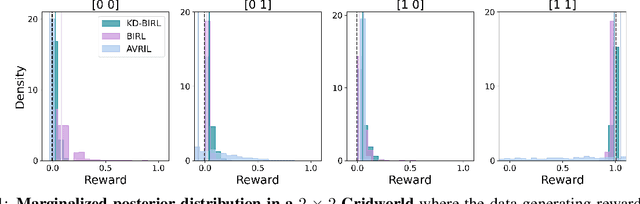
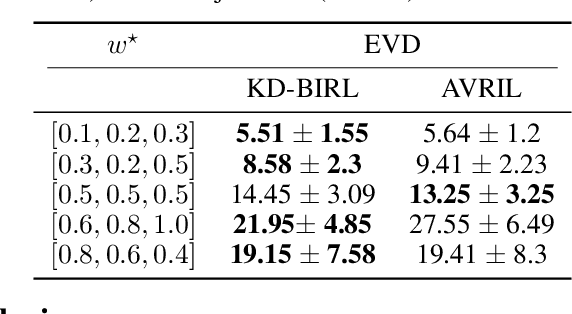
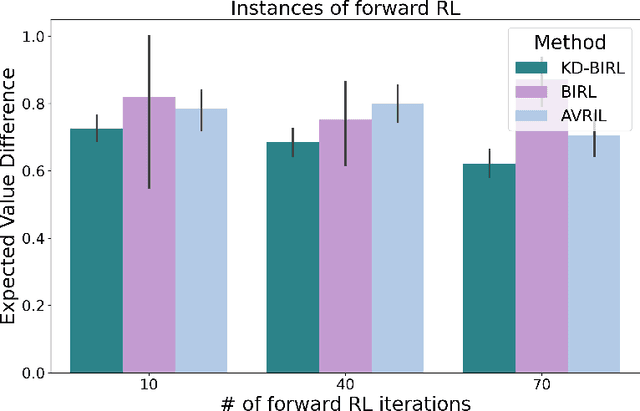
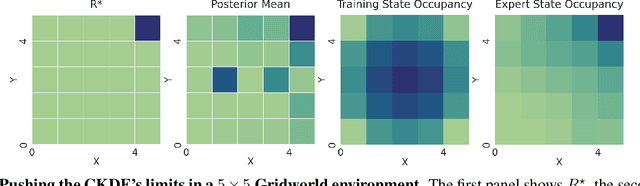
Inverse reinforcement learning~(IRL) is a powerful framework to infer an agent's reward function by observing its behavior, but IRL algorithms that learn point estimates of the reward function can be misleading because there may be several functions that describe an agent's behavior equally well. A Bayesian approach to IRL models a distribution over candidate reward functions, alleviating the shortcomings of learning a point estimate. However, several Bayesian IRL algorithms use a $Q$-value function in place of the likelihood function. The resulting posterior is computationally intensive to calculate, has few theoretical guarantees, and the $Q$-value function is often a poor approximation for the likelihood. We introduce kernel density Bayesian IRL (KD-BIRL), which uses conditional kernel density estimation to directly approximate the likelihood, providing an efficient framework that, with a modified reward function parameterization, is applicable to environments with complex and infinite state spaces. We demonstrate KD-BIRL's benefits through a series of experiments in Gridworld environments and a simulated sepsis treatment task.
Nested Policy Reinforcement Learning
Oct 06, 2021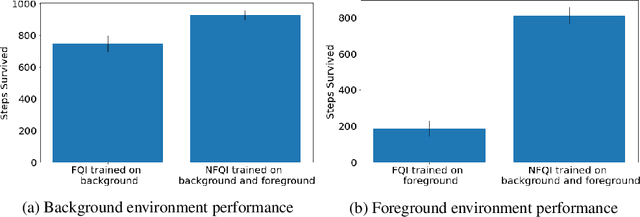

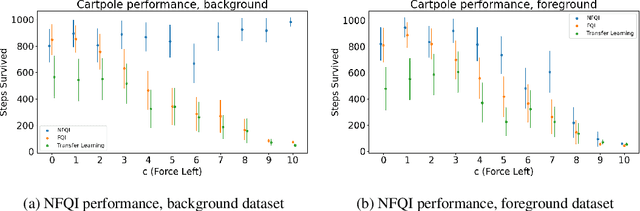
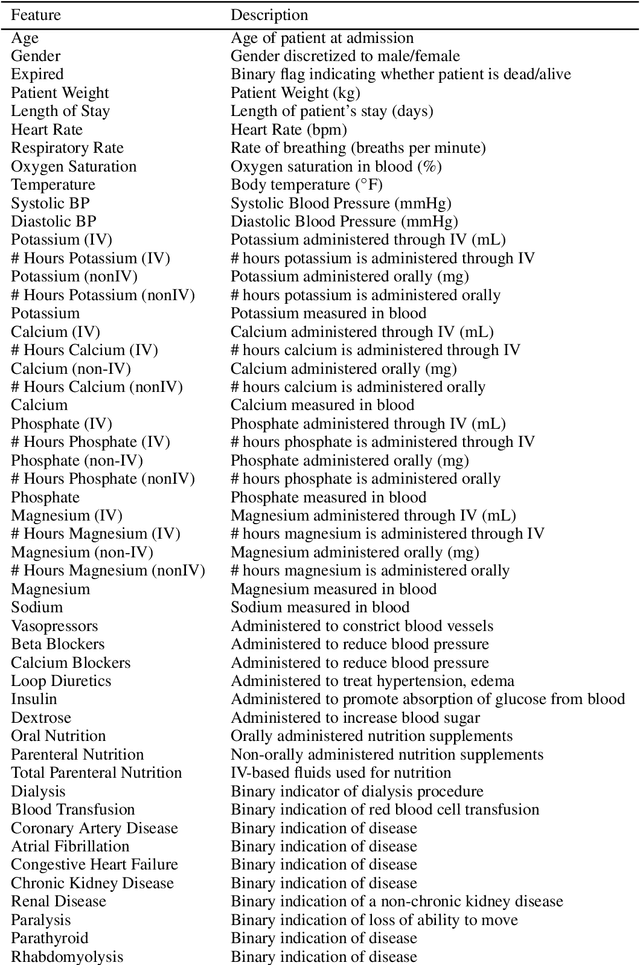
Off-policy reinforcement learning (RL) has proven to be a powerful framework for guiding agents' actions in environments with stochastic rewards and unknown or noisy state dynamics. In many real-world settings, these agents must operate in multiple environments, each with slightly different dynamics. For example, we may be interested in developing policies to guide medical treatment for patients with and without a given disease, or policies to navigate curriculum design for students with and without a learning disability. Here, we introduce nested policy fitted Q-iteration (NFQI), an RL framework that finds optimal policies in environments that exhibit such a structure. Our approach develops a nested $Q$-value function that takes advantage of the shared structure between two groups of observations from two separate environments while allowing their policies to be distinct from one another. We find that NFQI yields policies that rely on relevant features and perform at least as well as a policy that does not consider group structure. We demonstrate NFQI's performance using an OpenAI Gym environment and a clinical decision making RL task. Our results suggest that NFQI can develop policies that are better suited to many real-world clinical environments.