 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlberto Bemporad
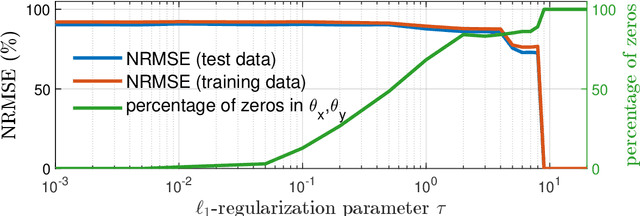
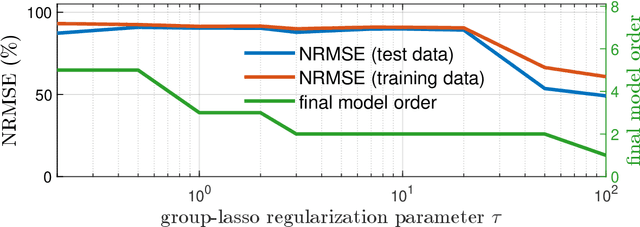
Linear and nonlinear system identification under $\ell_1$- and group-Lasso regularization via L-BFGS-B
Mar 06, 2024
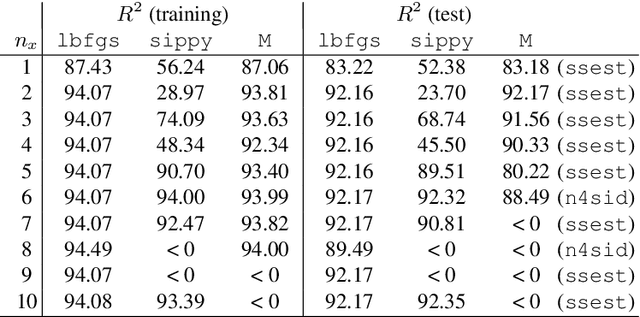
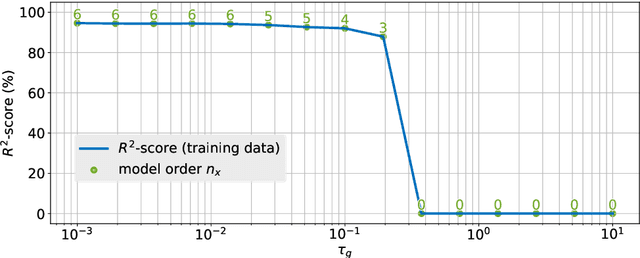
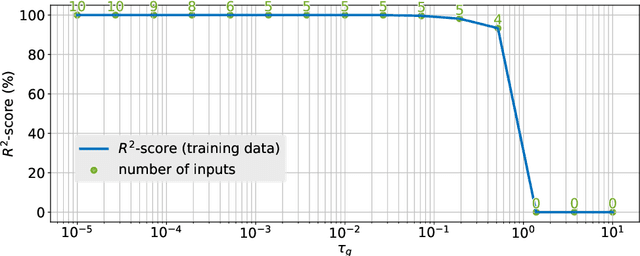
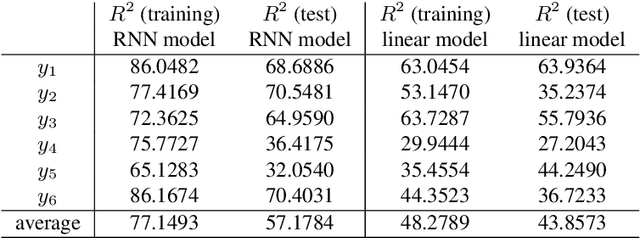
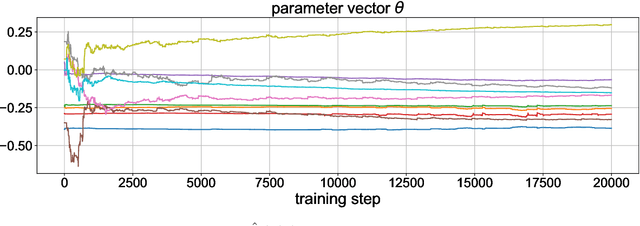
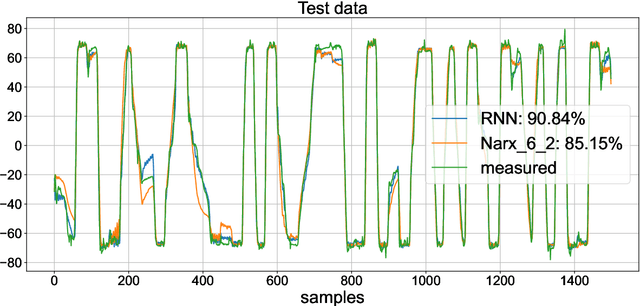
In this paper, we propose an approach for identifying linear and nonlinear discrete-time state-space models, possibly under $\ell_1$- and group-Lasso regularization, based on the L-BFGS-B algorithm. For the identification of linear models, we show that, compared to classical linear subspace methods, the approach often provides better results, is much more general in terms of the loss and regularization terms used, and is also more stable from a numerical point of view. The proposed method not only enriches the existing set of linear system identification tools but can be also applied to identifying a very broad class of parametric nonlinear state-space models, including recurrent neural networks. We illustrate the approach on synthetic and experimental datasets and apply it to solve the challenging industrial robot benchmark for nonlinear multi-input/multi-output system identification proposed by Weigand et al. (2022). A Python implementation of the proposed identification method is available in the package \texttt{jax-sysid}, available at \url{https://github.com/bemporad/jax-sysid}.
Self-concordant Smoothing for Convex Composite Optimization
Sep 04, 2023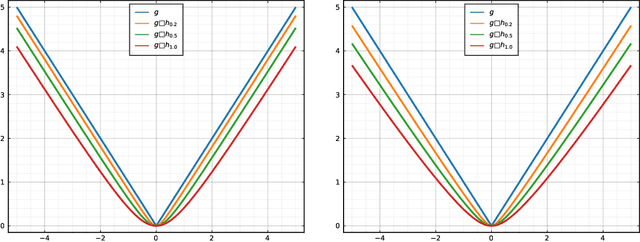
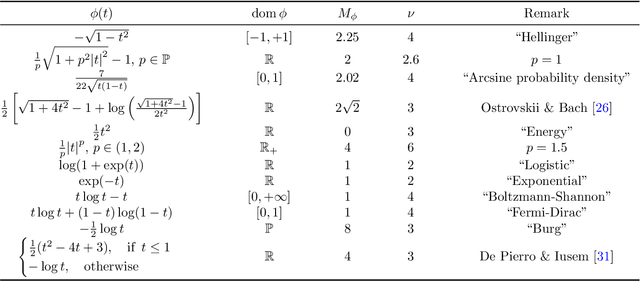
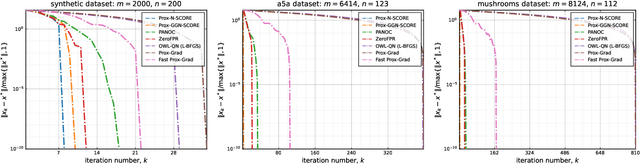
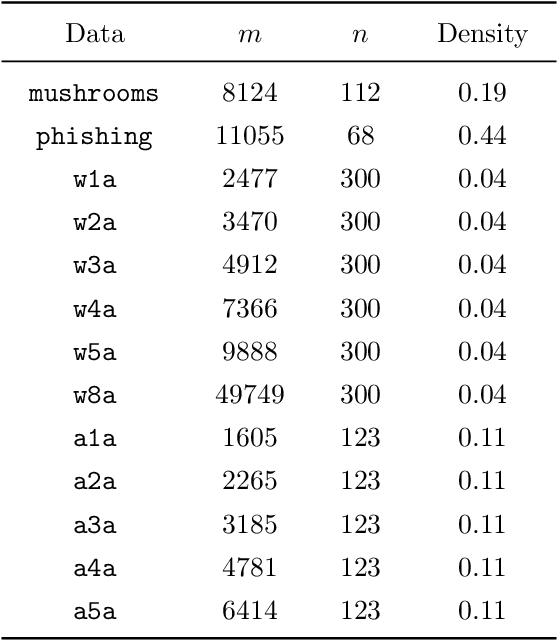
We introduce the notion of self-concordant smoothing for minimizing the sum of two convex functions: the first is smooth and the second may be nonsmooth. Our framework results naturally from the smoothing approximation technique referred to as partial smoothing in which only a part of the nonsmooth function is smoothed. The key highlight of our approach is in a natural property of the resulting problem's structure which provides us with a variable-metric selection method and a step-length selection rule particularly suitable for proximal Newton-type algorithms. In addition, we efficiently handle specific structures promoted by the nonsmooth function, such as $\ell_1$-regularization and group-lasso penalties. We prove local quadratic convergence rates for two resulting algorithms: Prox-N-SCORE, a proximal Newton algorithm and Prox-GGN-SCORE, a proximal generalized Gauss-Newton (GGN) algorithm. The Prox-GGN-SCORE algorithm highlights an important approximation procedure which helps to significantly reduce most of the computational overhead associated with the inverse Hessian. This approximation is essentially useful for overparameterized machine learning models and in the mini-batch settings. Numerical examples on both synthetic and real datasets demonstrate the efficiency of our approach and its superiority over existing approaches.
Global and Preference-based Optimization with Mixed Variables using Piecewise Affine Surrogates
Feb 09, 2023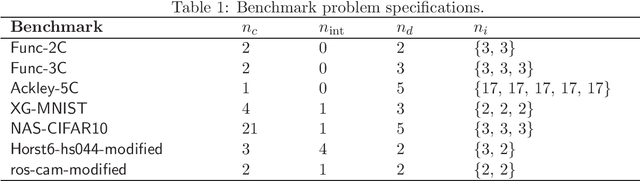
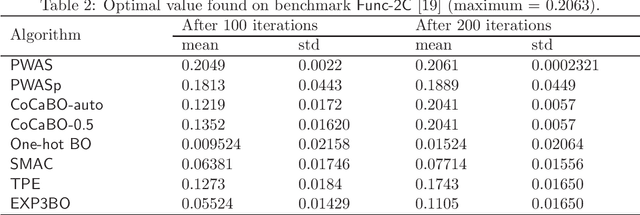
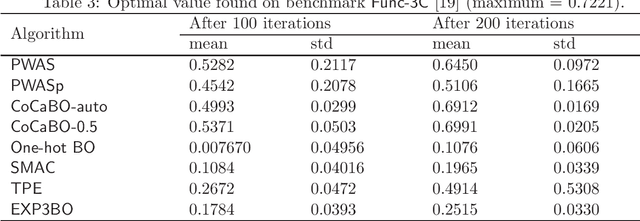
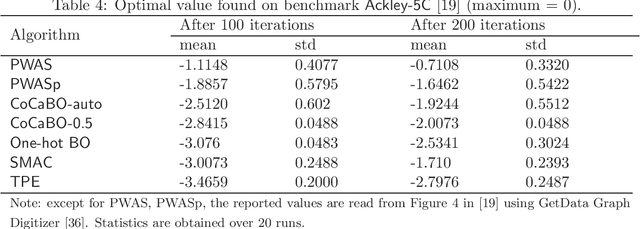
Optimization problems involving mixed variables, i.e., variables of numerical and categorical nature, can be challenging to solve, especially in the presence of complex constraints. Moreover, when the objective function is the result of a simulation or experiment, it may be expensive to evaluate. In this paper, we propose a novel surrogate-based global optimization algorithm, called PWAS, based on constructing a piecewise affine surrogate of the objective function over feasible samples. We introduce two types of exploration functions to efficiently search the feasible domain via mixed integer linear programming (MILP) solvers. We also provide a preference-based version of the algorithm, called PWASp, which can be used when only pairwise comparisons between samples can be acquired while the objective function remains unquantified. PWAS and PWASp are tested on mixed-variable benchmark problems with and without constraints. The results show that, within a small number of acquisitions, PWAS and PWASp can often achieve better or comparable results than other existing methods.
A learning-based approach to multi-agent decision-making
Dec 23, 2022

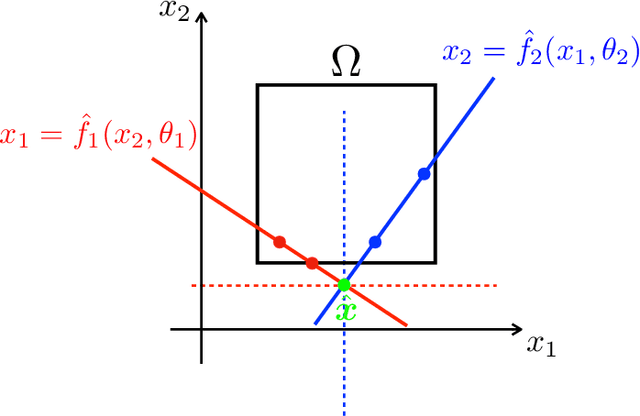
We propose a learning-based methodology to reconstruct private information held by a population of interacting agents in order to predict an exact outcome of the underlying multi-agent interaction process, here identified as a stationary action profile. We envision a scenario where an external observer, endowed with a learning procedure, is allowed to make queries and observe the agents' reactions through private action-reaction mappings, whose collective fixed point corresponds to a stationary profile. By adopting a smart query process to iteratively collect sensible data and update parametric estimates, we establish sufficient conditions to assess the asymptotic properties of the proposed learning-based methodology so that, if convergence happens, it can only be towards a stationary action profile. This fact yields two main consequences: i) learning locally-exact surrogates of the action-reaction mappings allows the external observer to succeed in its prediction task, and ii) working with assumptions so general that a stationary profile is not even guaranteed to exist, the established sufficient conditions hence act also as certificates for the existence of such a desirable profile. Extensive numerical simulations involving typical competitive multi-agent control and decision making problems illustrate the practical effectiveness of the proposed learning-based approach.
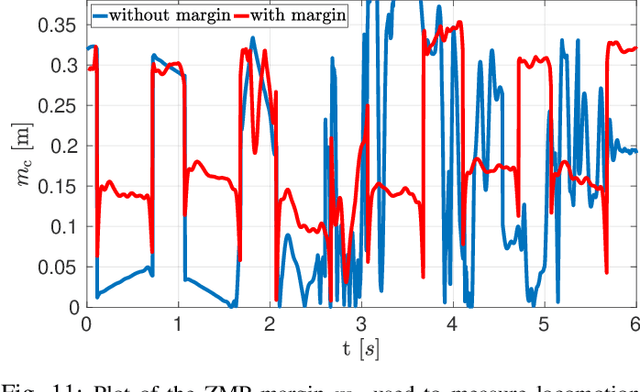
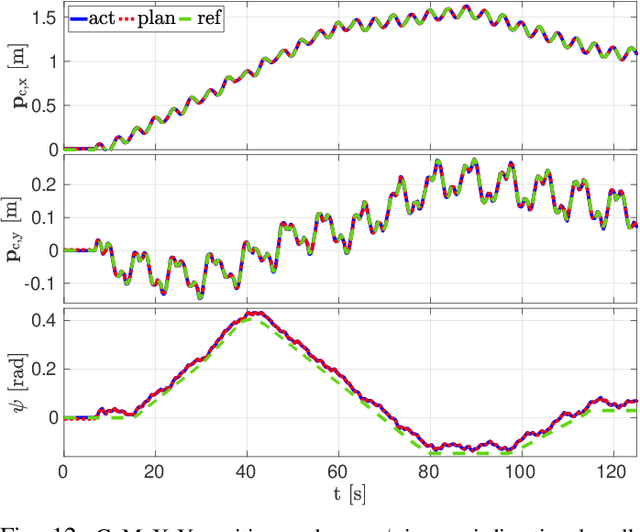
Governor: a Reference Generator for Nonlinear Model Predictive Control in Legged Robots
Jul 20, 2022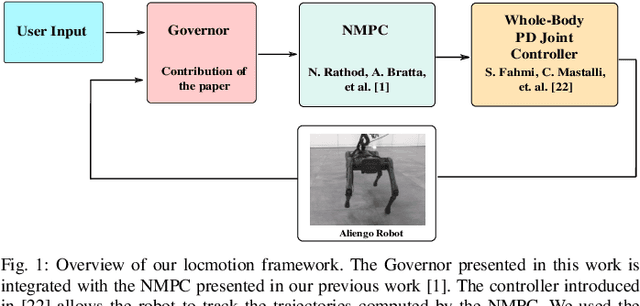
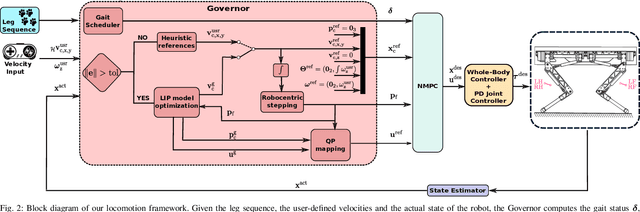
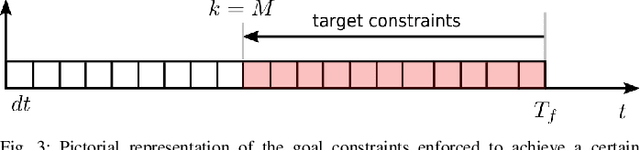
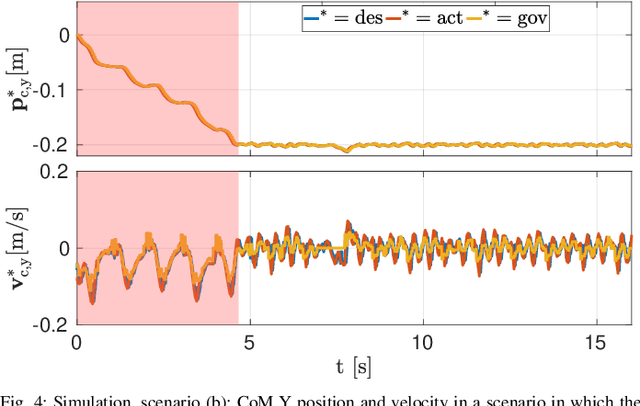
Model Predictive Control (MPC) approaches are widely used in robotics, since they allow to compute updated trajectories while the robot is moving. They generally require heuristic references for the tracking terms and proper tuning of parameters of the cost function in order to obtain good performance. When for example, a legged robot has to react to disturbances from the environment (e.g., recover after a push) or track a certain goal with statically unstable gaits, the effectiveness of the algorithm can degrade. In this work we propose a novel optimization-based Reference Generator, named Governor, which exploits a Linear Inverted Pendulum model to compute reference trajectories for the Center of Mass, while taking into account the possible under-actuation of a gait (e.g. in a trot). The obtained trajectories are used as references for the cost function of the Nonlinear MPC presented in our previous work [1]. We also present a formulation that can guarantee a certain response time to reach a goal, without the need to tune the weights of the cost terms. In addition, foothold locations are corrected to drive the robot towards the goal. We demonstrate the effectiveness of our approach both in simulations and experiments in different scenarios with the Aliengo robot.
Active Learning for Regression and Classification by Inverse Distance Weighting
Apr 14, 2022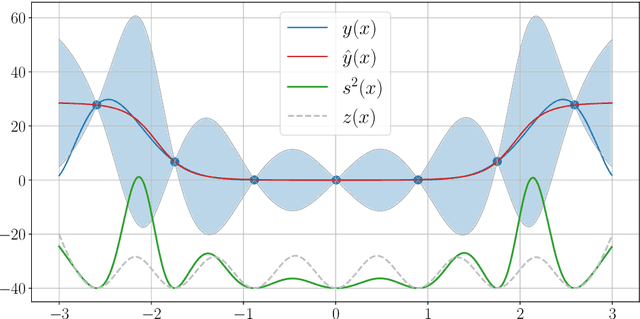
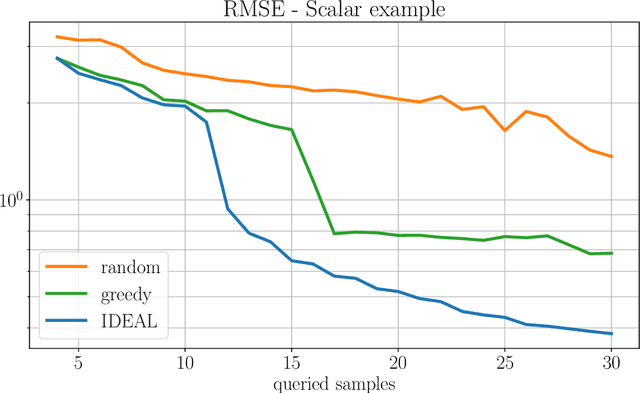
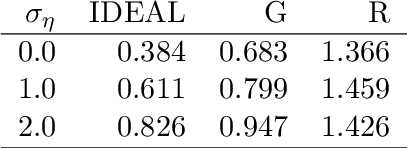
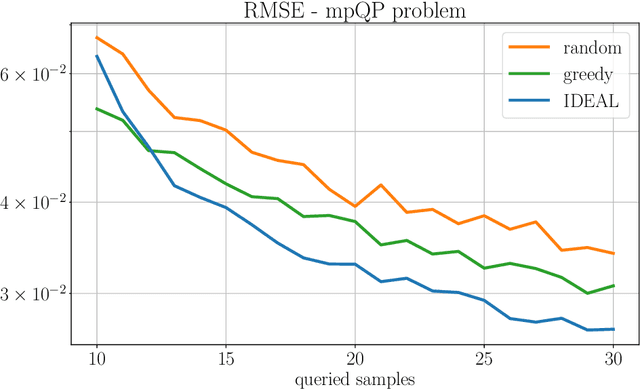
This paper proposes an active learning algorithm for solving regression and classification problems based on inverse-distance weighting functions for selecting the feature vectors to query. The algorithm has the following features: (i) supports both pool-based and population-based sampling; (ii) is independent of the type of predictor used; (iii) can handle known and unknown constraints on the queryable feature vectors; and (iv) can run either sequentially, or in batch mode, depending on how often the predictor is retrained. The method's potential is shown in numerical tests on illustrative synthetic problems and real-world regression and classification datasets from the UCI repository. A Python implementation of the algorithm that we call IDEAL (Inverse-Distance based Exploration for Active Learning), is available at \url{http://cse.lab.imtlucca.it/~bemporad/ideal}.
Training Recurrent Neural Networks by Sequential Least Squares and the Alternating Direction Method of Multipliers
Dec 31, 2021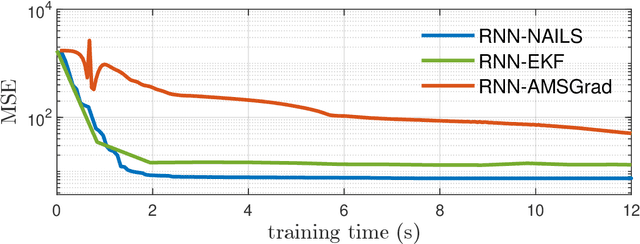
For training recurrent neural network models of nonlinear dynamical systems from an input/output training dataset based on rather arbitrary convex and twice-differentiable loss functions and regularization terms, we propose the use of sequential least squares for determining the optimal network parameters and hidden states. In addition, to handle non-smooth regularization terms such as L1, L0, and group-Lasso regularizers, as well as to impose possibly non-convex constraints such as integer and mixed-integer constraints, we combine sequential least squares with the alternating direction method of multipliers (ADMM). The performance of the resulting algorithm, that we call NAILS (Nonconvex ADMM Iterations and Least Squares), is tested in a nonlinear system identification benchmark.
SC-Reg: Training Overparameterized Neural Networks under Self-Concordant Regularization
Dec 14, 2021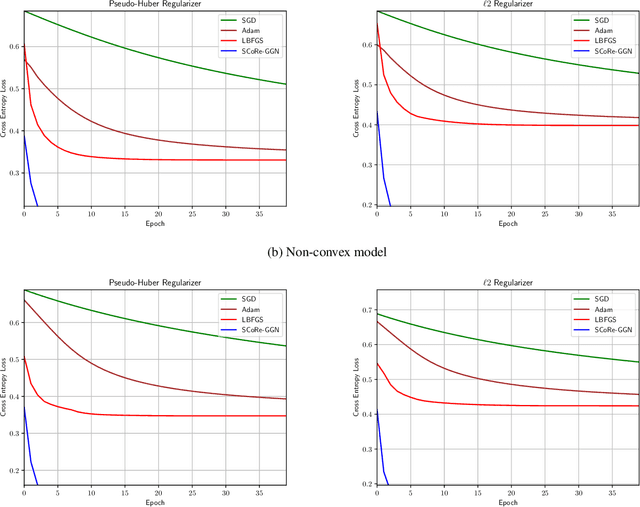

In this paper we propose the SC-Reg (self-concordant regularization) framework for learning overparameterized feedforward neural networks by incorporating second-order information in the \emph{Newton decrement} framework for convex problems. We propose the generalized Gauss-Newton with Self-Concordant Regularization (SCoRe-GGN) algorithm that updates the network parameters each time it receives a new input batch. The proposed algorithm exploits the structure of the second-order information in the Hessian matrix, thereby reducing the training computational overhead. Although our current analysis considers only the convex case, numerical experiments show the efficiency of our method and its fast convergence under both convex and non-convex settings, which compare favorably against baseline first-order methods and a quasi-Newton method.
Recurrent Neural Network Training with Convex Loss and Regularization Functions by Extended Kalman Filtering
Nov 04, 2021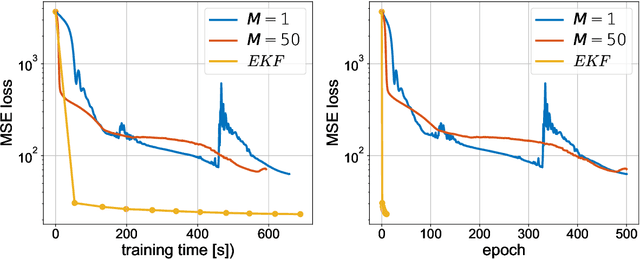
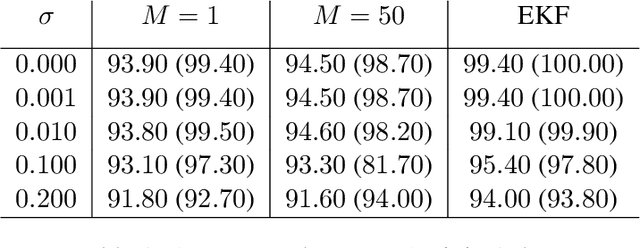
We investigate the use of extended Kalman filtering to train recurrent neural networks for data-driven nonlinear, possibly adaptive, model-based control design. We show that the approach can be applied to rather arbitrary convex loss functions and regularization terms on the network parameters. We show that the learning method outperforms stochastic gradient descent in a nonlinear system identification benchmark and in training a linear system with binary outputs. We also explore the use of the algorithm in data-driven nonlinear model predictive control and its relation with disturbance models for offset-free tracking.
Mobility-enhanced MPC for Legged Locomotion on Rough Terrain
May 12, 2021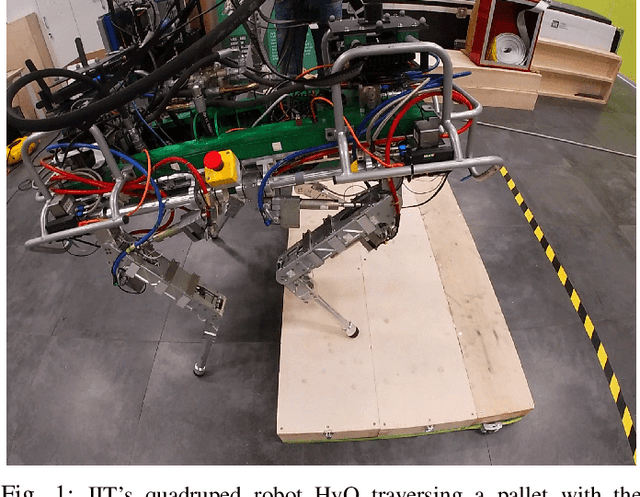
Re-planning in legged locomotion is crucial to track a given set-point while adapting to the terrain and rejecting external disturbances. In this work, we propose a real-time Nonlinear Model Predictive Control (NMPC) tailored to a legged robot for achieving dynamic locomotion on a wide variety of terrains. We introduce a mobility-based criterion to define an NMPC cost that enhances the locomotion of quadruped robots while maximizing leg mobility and staying far from kinematic limits. Our NMPC is based on the real-time iteration scheme that allows us to re-plan online at $25 \, \mathrm{Hz}$ with a time horizon of $2$ seconds. We use the single rigid body dynamic model defined in the center of mass frame that allows to increase the computational efficiency. In simulations, the NMPC is tested to traverse a set of pallets of different sizes, to walk into a V-shaped chimney, and to locomote over rough terrain. We demonstrate the effectiveness of our NMPC with the mobility feature that allowed IIT's $87.4 \,\mathrm{kg}$ quadruped robot HyQ to achieve an omni-directional walk on flat terrain, to traverse a static pallet, and to adapt to a repositioned pallet during a walk in real experiments.