 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAndrew P. Sabelhaus
Maximizing Consistent Force Output for Shape Memory Alloy Artificial Muscles in Soft Robots
Feb 09, 2024
Soft robots have immense potential given their inherent safety and adaptability, but challenges in soft actuator forces and design constraints have limited scaling up soft robots to larger sizes. Electrothermal shape memory alloy (SMA) artificial muscles have the potential to create these large forces and high displacements, but consistently using these muscles under a well-defined model, in-situ in a soft robot, remains an open challenge. This article provides a system for maintaining the highest-possible consistent SMA forces, over long lifetimes, by combining a fatigue testing protocol with a supervisory control system for the muscles' internal temperature state. We propose a design of a soft limb with swap-able SMA muscles, and deploy the limb in a blocked-force test to quantify the relationship between the measured maximum force at different temperatures over different lifetimes. Then, by applying an invariance-based control system to maintain temperatures under our long-life limit, we demonstrate consistent high forces in a practical task over hundreds of cycles. The method we developed allows for practical implementation of SMAs in soft robots through characterizing and controlling their behavior in-situ, and provides a method to impose limits that maximize their consistent, repeatable behavior.
Safe Balancing Control of a Soft Legged Robot
Sep 27, 2022



Legged robots constructed from soft materials are commonly claimed to demonstrate safer, more robust environmental interactions than their rigid counterparts. However, this motivating feature of soft robots requires more rigorous development for comparison to rigid locomotion. This article presents a soft legged robot platform, Horton, and a feedback control system with safety guarantees on some aspects of its operation. The robot is constructed using a series of soft limbs, actuated by thermal shape memory alloy (SMA) wire muscles, with sensors for its position and its actuator temperatures. A supervisory control scheme maintains safe actuator states during the operation of a separate controller for the robot's pose. Experiments demonstrate that Horton can lift its leg and maintain a balancing stance, a precursor to locomotion. The supervisor is verified in hardware via a human interaction test during balancing, keeping all SMA muscles below a temperature threshold. This work represents the first demonstration of a safety-verified feedback system on any soft legged robot.
Safe Supervisory Control of Soft Robot Actuators
Aug 02, 2022



Although soft robots show safer interactions with their environment than traditional robots, soft mechanisms and actuators still have significant potential for damage or degradation particularly during unmodeled contact. This article introduces a feedback strategy for safe soft actuator operation during control of a soft robot. To do so, a supervisory controller monitors actuator state and dynamically saturates control inputs to avoid conditions that could lead to physical damage. We prove that, under certain conditions, the supervisory controller is stable and verifiably safe. We then demonstrate completely onboard operation of the supervisory controller using a soft thermally-actuated robot limb with embedded shape memory alloy (SMA) actuators and sensing. Tests performed with the supervisor verify its theoretical properties and show stabilization of the robot limb's pose in free space. Finally, experiments show that our approach prevents overheating during contact (including environmental constraints and human contact) or when infeasible motions are commanded. This supervisory controller, and its ability to be executed with completely onboard sensing, has the potential to make soft robot actuators reliable enough for practical use.
Learned Dynamics of Electrothermally-Actuated Soft Robot Limbs Using LSTM Neural Networks
Nov 08, 2021



Modeling the dynamics of soft robot limbs with electrothermal actuators is generally challenging due to thermal and mechanical hysteresis and the complex physical interactions that can arise during robot operation. This article proposes a neural network based on long short-term memory (LSTM) to address these challenges in actuator modeling. A planar soft limb, actuated by a pair of shape memory alloy (SMA) coils and containing embedded sensors for temperature and angular deflection, is used as a test platform. Data from this robot are used to train LSTM neural networks, using different combinations of sensor data, to model both unidirectional (one SMA) and bidirectional (both SMAs) motion. Open-loop rollout results show that the learned model is able to predict motions over extraordinarily long open-loop timescales (10 minutes) with little drift. Prediction errors are on the order of the soft deflection sensor's accuracy, even when using only the actuator's pulse width modulation inputs for learning. These LSTM models can be used in-situ, without extensive sensing, helping to bring soft electrothermally-actuated robots into practical application.
Robust Control of a Multi-Axis Shape Memory Alloy-Driven Soft Manipulator
Oct 20, 2021



Control of soft robotic manipulators remains a challenge for designs with advanced capabilities and novel actuation. Two significant limitations are multi-axis, three-dimensional motion of soft bodies alongside actuator dynamics and constraints, both of which are present in shape-memory-alloy (SMA)-powered soft robots. This article addresses both concerns with a robust feedback control scheme, demonstrating state tracking control for a soft robot manipulator of this type. Our controller uses a static beam bending model to approximate the soft limb as an LTI system, alongside a singular-value-decomposition compensator approach to decouple the multi-axial motion and an anti-windup element for the actuator saturation. We prove stability and verify robustness of our controller, with robustness intended to account for the unmodeled dynamics. Our implementation is verified in hardware tests of a soft SMA-powered limb, showing low tracking error, with promising results for future multi-limbed robots.
Trajectory Optimization for Thermally-Actuated Soft Planar Robot Limbs
Oct 18, 2021



Practical use of robotic manipulators made from soft materials will require planning for complex motions. We present the first approach for generating trajectories of a thermally-actuated soft robotic manipulator. Based on simplified approximations of the soft arm and its shape-memory-alloy (SMA) wires, we justify a dynamics model of a discretized rigid manipulator with joint torques proportional to wire temperature. Then, we propose a method to calibrate this model from hardware data, and demonstrate that the simulation aligns well with a test trajectory. Finally, we use direct collocation trajectory optimization with the non-linear dynamics to derive open-loop controls for feasible trajectories that closely align with desired reference inputs. Two example trajectories are verified in hardware. The results show promise for both open-loop planning as well as for future applications with feedback.
An Untethered Brittle Star Robot for Closed-Loop Underwater Locomotion
Mar 30, 2020



Soft robots are capable of inherently safer and more stable interactions with their environment since they can mechanically deform in response to unanticipated interactions. However, their complex mechanics can make operation difficult, particularly with tasks such as locomotion, and robust systems are needed for evaluating and testing new planning and control algorithms. In this work, we present the first mobile and untethered underwater crawling soft robot. PATRICK is a robotic testbed inspired by brittle stars that demonstrates closed-loop locomotion planning. PATRICK contains five soft legs actuated by a total of 20 shape-memory-alloy (SMA) wires, providing a rich variety of possible motions. This testbed is the first instance of real-time position tracking for an untethered soft crawling robot. Experiments demonstrate that a motion planner can command the robot to locomote to a goal state, given a simple set of motion primitives. This work demonstrates progress toward full autonomy of soft, mobile robotic systems
Design, Simulation, and Testing of a Flexible Actuated Spine for Quadruped Robots
Sep 11, 2018



Walking quadruped robots face challenges in positioning their feet and lifting their legs during gait cycles over uneven terrain. The robot Laika is under development as a quadruped with a flexible, actuated spine designed to assist with foot movement and balance during these gaits. This paper presents the first set of hardware designs for the spine of Laika, a physical prototype of those designs, and tests in both hardware and simulations that show the prototype's capabilities. Laika's spine is a tensegrity structure, used for its advantages with weight and force distribution, and represents the first working prototype of a tensegrity spine for a quadruped robot. The spine bends by adjusting the lengths of the cables that separate its vertebrae, and twists using an actuated rotating vertebra at its center. The current prototype of Laika has stiff legs attached to the spine, and is used as a test setup for evaluation of the spine itself. This work shows the advantages of Laika's spine by demonstrating the spine lifting each of the robot's four feet, both as a form of balancing and as a precursor for a walking gait. These foot motions, using specific combinations of bending and rotation movements of the spine, are measured in both simulation and hardware experiments. Hardware data are used to calibrate the simulations, such that the simulations can be used for control of balancing or gait cycles in the future. Future work will attach actuated legs to Laika's spine, and examine balancing and gait cycles when combined with leg movements.
Trajectory Tracking Control of a Flexible Spine Robot, With and Without a Reference Input
Aug 24, 2018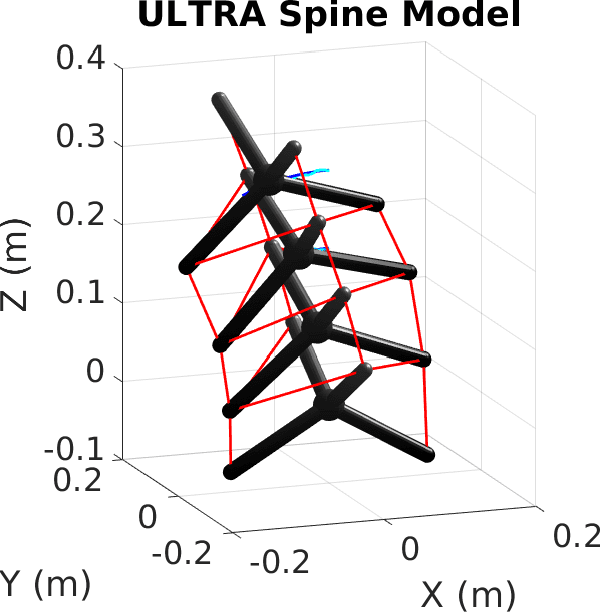
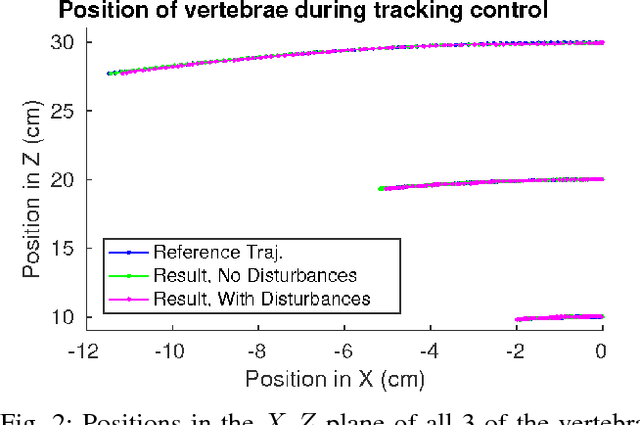
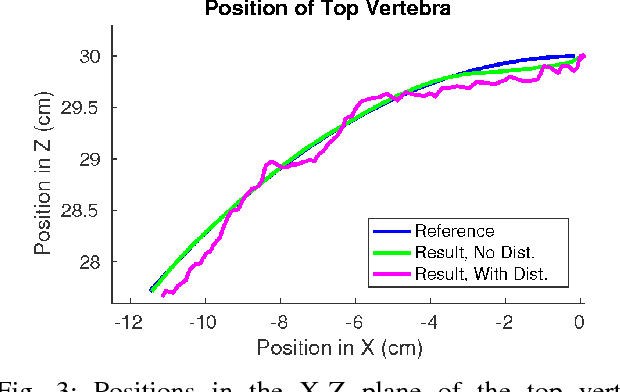
The Underactuated Lightweight Tensegrity Robotic Assistive Spine (ULTRA Spine) project is an ongoing effort to develop a flexible, actuated backbone for quadruped robots. In this work, model-predictive control is used to track a trajectory in the robot's state space, in simulation. The state trajectory used here corresponds to a bending motion of the spine, with translations and rotations of the moving vertebrae. Two different controllers are presented in this work: one that does not use a reference input but includes smoothing constrants, and a second one that uses a reference input without smoothing. For the smoothing controller, without reference inputs, the error converges to zero, while the simpler-to-tune controller with an input reference shows small errors but not complete convergence. It is expected that this controller will converge as it is improved further.
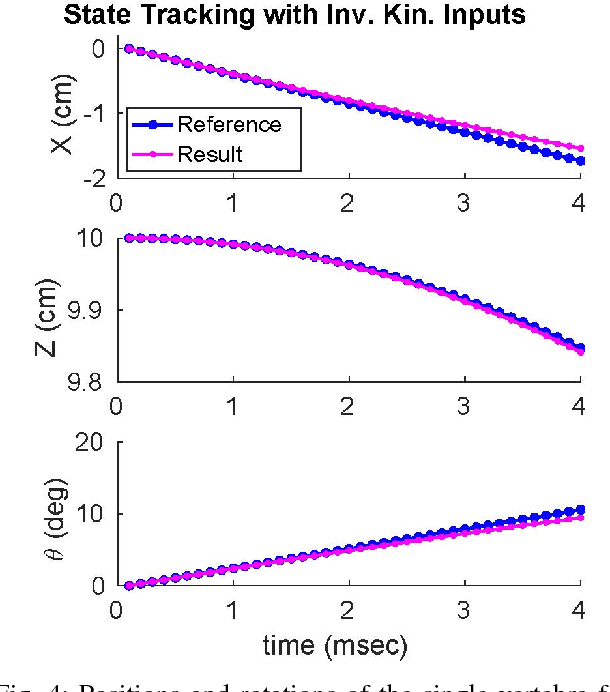
Inverse Kinematics for Control of Tensegrity Soft Robots: Existence and Optimality of Solutions
Aug 24, 2018

Tension-network (`tensegrity') robots encounter many control challenges as articulated soft robots, due to the structures' high-dimensional nonlinear dynamics. Control approaches have been developed which use the inverse kinematics of tensegrity structures, either for open-loop control or as equilibrium inputs for closed-loop controllers. However, current formulations of the tensegrity inverse kinematics problem are limited in robotics applications: first, they can lead to higher than needed cable tensions, and second, may lack solutions when applied to robots with high node-to-cable ratios. This work provides progress in both directions. To address the first limitation, the objective function for the inverse kinematics optimization problem is modified to produce cable tensions as low or lower than before, thus reducing the load on the robots' motors. For the second, a reformulation of the static equilibrium constraint is proposed, which produces solutions independent of the number of nodes within each rigid body. Simulation results using the second reformulation on a specific tensegrity spine robot show reasonable open-loop control results, whereas the previous formulation could not produce any solution.