 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnthony GX-Chen
Light-weight probing of unsupervised representations for Reinforcement Learning
Aug 25, 2022

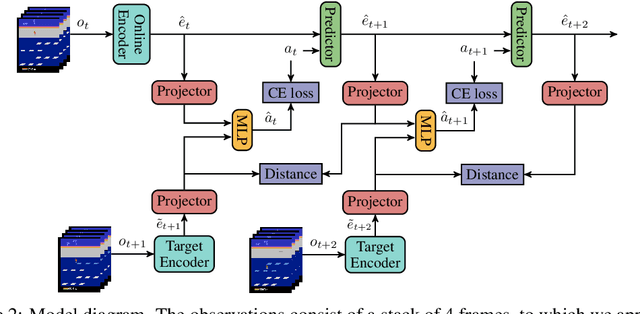
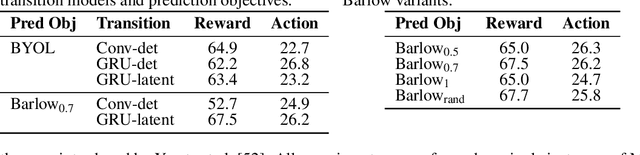
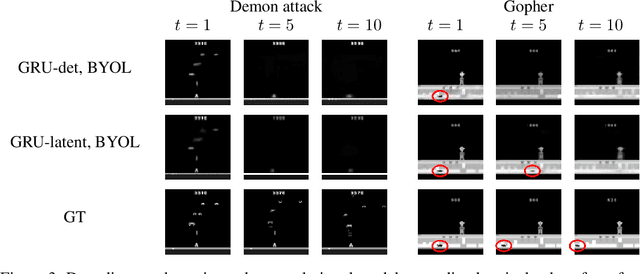
Unsupervised visual representation learning offers the opportunity to leverage large corpora of unlabeled trajectories to form useful visual representations, which can benefit the training of reinforcement learning (RL) algorithms. However, evaluating the fitness of such representations requires training RL algorithms which is computationally intensive and has high variance outcomes. To alleviate this issue, we design an evaluation protocol for unsupervised RL representations with lower variance and up to 600x lower computational cost. Inspired by the vision community, we propose two linear probing tasks: predicting the reward observed in a given state, and predicting the action of an expert in a given state. These two tasks are generally applicable to many RL domains, and we show through rigorous experimentation that they correlate strongly with the actual downstream control performance on the Atari100k Benchmark. This provides a better method for exploring the space of pretraining algorithms without the need of running RL evaluations for every setting. Leveraging this framework, we further improve existing self-supervised learning (SSL) recipes for RL, highlighting the importance of the forward model, the size of the visual backbone, and the precise formulation of the unsupervised objective.
A Generalized Bootstrap Target for Value-Learning, Efficiently Combining Value and Feature Predictions
Jan 05, 2022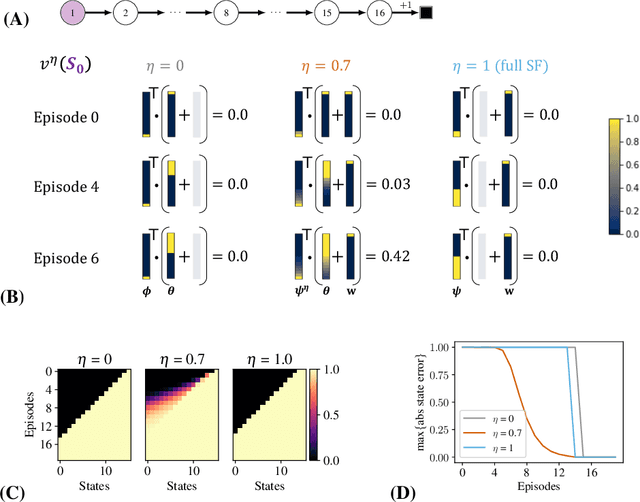
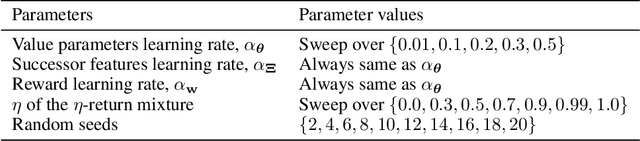
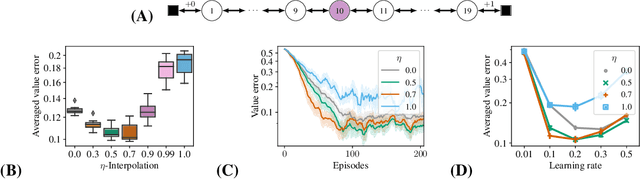
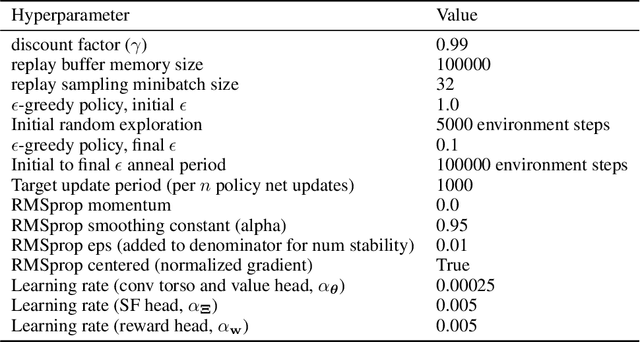
Estimating value functions is a core component of reinforcement learning algorithms. Temporal difference (TD) learning algorithms use bootstrapping, i.e. they update the value function toward a learning target using value estimates at subsequent time-steps. Alternatively, the value function can be updated toward a learning target constructed by separately predicting successor features (SF)--a policy-dependent model--and linearly combining them with instantaneous rewards. We focus on bootstrapping targets used when estimating value functions, and propose a new backup target, the $\eta$-return mixture, which implicitly combines value-predictive knowledge (used by TD methods) with (successor) feature-predictive knowledge--with a parameter $\eta$ capturing how much to rely on each. We illustrate that incorporating predictive knowledge through an $\eta\gamma$-discounted SF model makes more efficient use of sampled experience, compared to either extreme, i.e. bootstrapping entirely on the value function estimate, or bootstrapping on the product of separately estimated successor features and instantaneous reward models. We empirically show this approach leads to faster policy evaluation and better control performance, for tabular and nonlinear function approximations, indicating scalability and generality.