 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnthony Wang
Robot Air Hockey: A Manipulation Testbed for Robot Learning with Reinforcement Learning
May 06, 2024
Reinforcement Learning is a promising tool for learning complex policies even in fast-moving and object-interactive domains where human teleoperation or hard-coded policies might fail. To effectively reflect this challenging category of tasks, we introduce a dynamic, interactive RL testbed based on robot air hockey. By augmenting air hockey with a large family of tasks ranging from easy tasks like reaching, to challenging ones like pushing a block by hitting it with a puck, as well as goal-based and human-interactive tasks, our testbed allows a varied assessment of RL capabilities. The robot air hockey testbed also supports sim-to-real transfer with three domains: two simulators of increasing fidelity and a real robot system. Using a dataset of demonstration data gathered through two teleoperation systems: a virtualized control environment, and human shadowing, we assess the testbed with behavior cloning, offline RL, and RL from scratch.
Modeling Student Performance in Game-Based Learning Environments
Sep 23, 2023This study investigates game-based learning in the context of the educational game "Jo Wilder and the Capitol Case," focusing on predicting student performance using various machine learning models, including K-Nearest Neighbors (KNN), Multi-Layer Perceptron (MLP), and Random Forest. The research aims to identify the features most predictive of student performance and correct question answering. By leveraging gameplay data, we establish complete benchmarks for these models and explore the importance of applying proper data aggregation methods. By compressing all numeric data to min/max/mean/sum and categorical data to first, last, count, and nunique, we reduced the size of the original training data from 4.6 GB to 48 MB of preprocessed training data, maintaining high F1 scores and accuracy. Our findings suggest that proper preprocessing techniques can be vital in enhancing the performance of non-deep-learning-based models. The MLP model outperformed the current state-of-the-art French Touch model, achieving an F-1 score of 0.83 and an accuracy of 0.74, suggesting its suitability for this dataset. Future research should explore using larger datasets, other preprocessing techniques, more advanced deep learning techniques, and real-world applications to provide personalized learning recommendations to students based on their predicted performance. This paper contributes to the understanding of game-based learning and provides insights into optimizing educational game experiences for improved student outcomes and skill development.
Design and Deployment of an Autonomous Unmanned Ground Vehicle for Urban Firefighting Scenarios
Jul 08, 2021
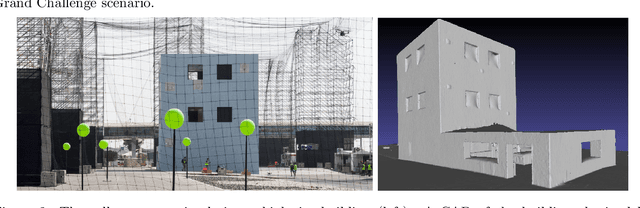
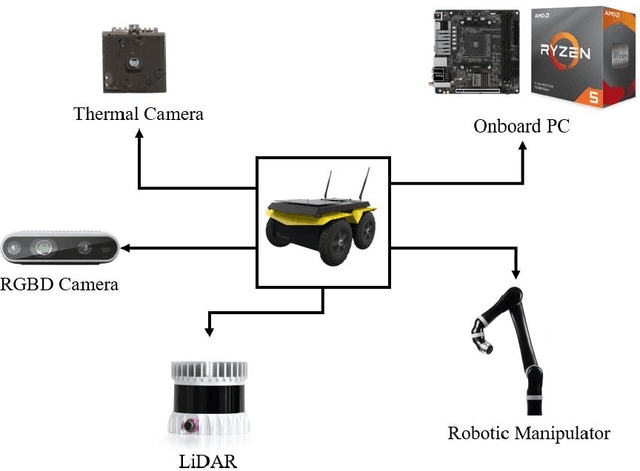
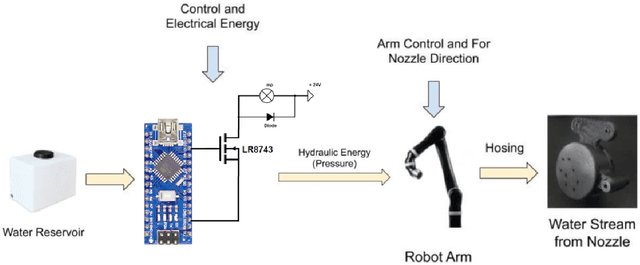
Autonomous mobile robots have the potential to solve missions that are either too complex or dangerous to be accomplished by humans. In this paper, we address the design and autonomous deployment of a ground vehicle equipped with a robotic arm for urban firefighting scenarios. We describe the hardware design and algorithm approaches for autonomous navigation, planning, fire source identification and abatement in unstructured urban scenarios. The approach employs on-board sensors for autonomous navigation and thermal camera information for source identification. A custom electro{mechanical pump is responsible to eject water for fire abatement. The proposed approach is validated through several experiments, where we show the ability to identify and abate a sample heat source in a building. The whole system was developed and deployed during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020, for Challenge No. 3 Fire Fighting Inside a High-Rise Building and during the Grand Challenge where our approach scored the highest number of points among all UGV solutions and was instrumental to win the first place.
Mobile Manipulator for Autonomous Localization, Grasping and Precise Placement of Construction Material in a Semi-structured Environment
Nov 16, 2020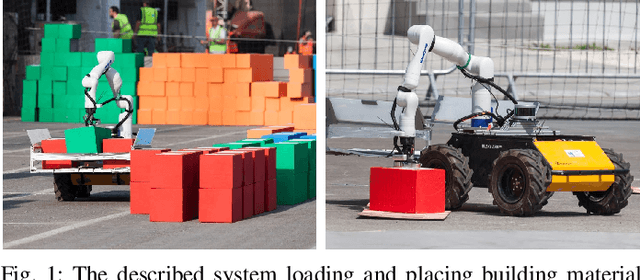
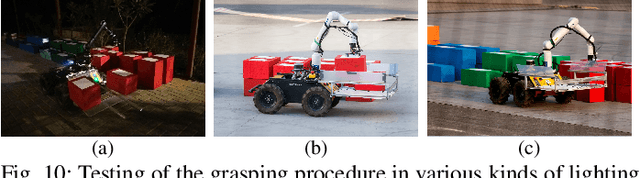
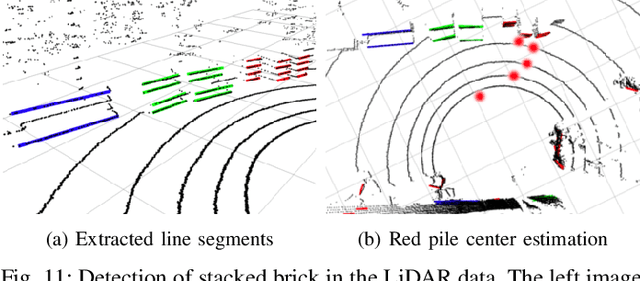
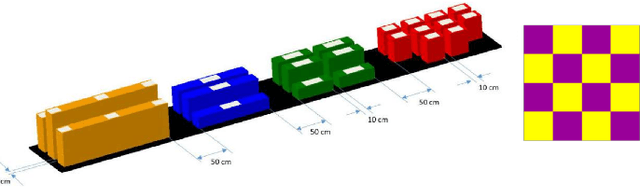
Mobile manipulators have the potential to revolutionize modern agriculture, logistics and manufacturing. In this work, we present the design of a ground-based mobile manipulator for automated structure assembly. The proposed system is capable of autonomous localization, grasping, transportation and deployment of construction material in a semi-structured environment. Special effort was put into making the system invariant to lighting changes, and not reliant on external positioning systems. Therefore, the presented system is self-contained and capable of operating in outdoor and indoor conditions alike. Finally, we present means to extend the perceptive radius of the vehicle by using it in cooperation with an autonomous drone, which provides aerial reconnaissance. Performance of the proposed system has been evaluated in a series of experiments conducted in real-world conditions.