 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArsalan Mosenia
DARTS: Deceiving Autonomous Cars with Toxic Signs
May 31, 2018
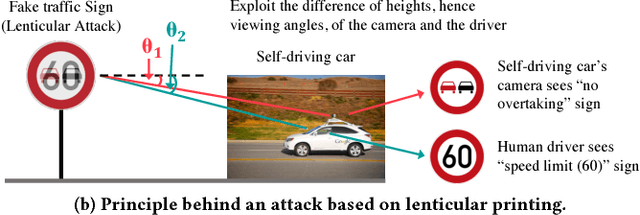
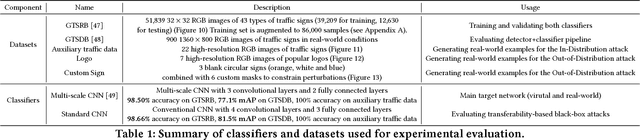
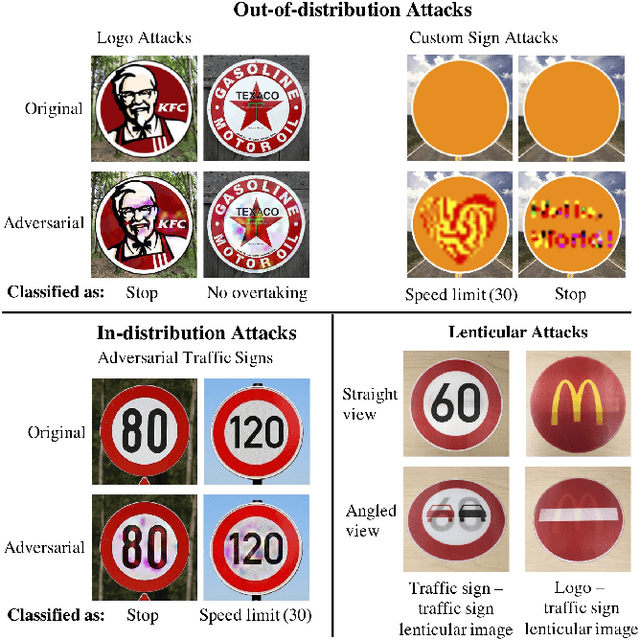

Sign recognition is an integral part of autonomous cars. Any misclassification of traffic signs can potentially lead to a multitude of disastrous consequences, ranging from a life-threatening accident to even a large-scale interruption of transportation services relying on autonomous cars. In this paper, we propose and examine security attacks against sign recognition systems for Deceiving Autonomous caRs with Toxic Signs (we call the proposed attacks DARTS). In particular, we introduce two novel methods to create these toxic signs. First, we propose Out-of-Distribution attacks, which expand the scope of adversarial examples by enabling the adversary to generate these starting from an arbitrary point in the image space compared to prior attacks which are restricted to existing training/test data (In-Distribution). Second, we present the Lenticular Printing attack, which relies on an optical phenomenon to deceive the traffic sign recognition system. We extensively evaluate the effectiveness of the proposed attacks in both virtual and real-world settings and consider both white-box and black-box threat models. Our results demonstrate that the proposed attacks are successful under both settings and threat models. We further show that Out-of-Distribution attacks can outperform In-Distribution attacks on classifiers defended using the adversarial training defense, exposing a new attack vector for these defenses.
Rogue Signs: Deceiving Traffic Sign Recognition with Malicious Ads and Logos
Mar 26, 2018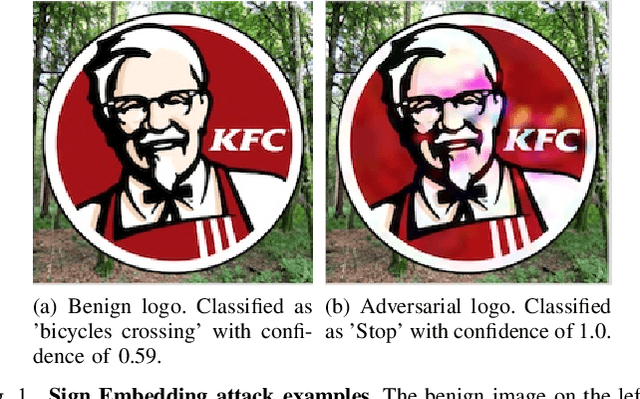
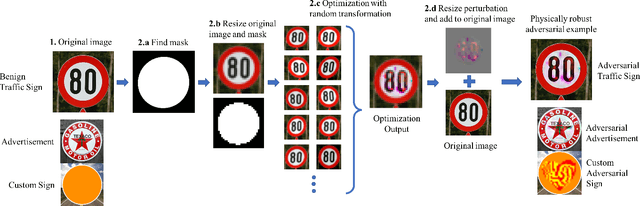
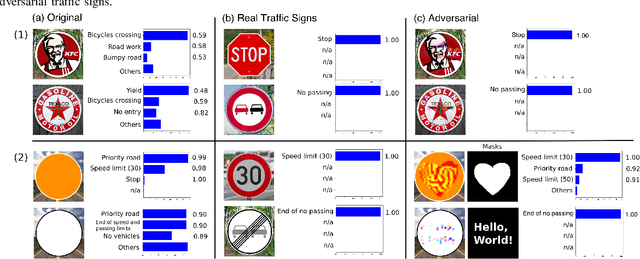
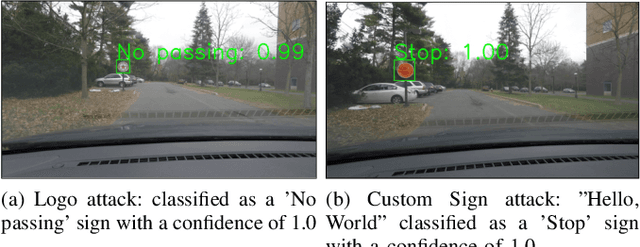
We propose a new real-world attack against the computer vision based systems of autonomous vehicles (AVs). Our novel Sign Embedding attack exploits the concept of adversarial examples to modify innocuous signs and advertisements in the environment such that they are classified as the adversary's desired traffic sign with high confidence. Our attack greatly expands the scope of the threat posed to AVs since adversaries are no longer restricted to just modifying existing traffic signs as in previous work. Our attack pipeline generates adversarial samples which are robust to the environmental conditions and noisy image transformations present in the physical world. We ensure this by including a variety of possible image transformations in the optimization problem used to generate adversarial samples. We verify the robustness of the adversarial samples by printing them out and carrying out drive-by tests simulating the conditions under which image capture would occur in a real-world scenario. We experimented with physical attack samples for different distances, lighting conditions and camera angles. In addition, extensive evaluations were carried out in the virtual setting for a variety of image transformations. The adversarial samples generated using our method have adversarial success rates in excess of 95% in the physical as well as virtual settings.