 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArun Kumar Singh
Bi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
Apr 11, 2024
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
LeGo-Drive: Language-enhanced Goal-oriented Closed-Loop End-to-End Autonomous Driving
Mar 29, 2024
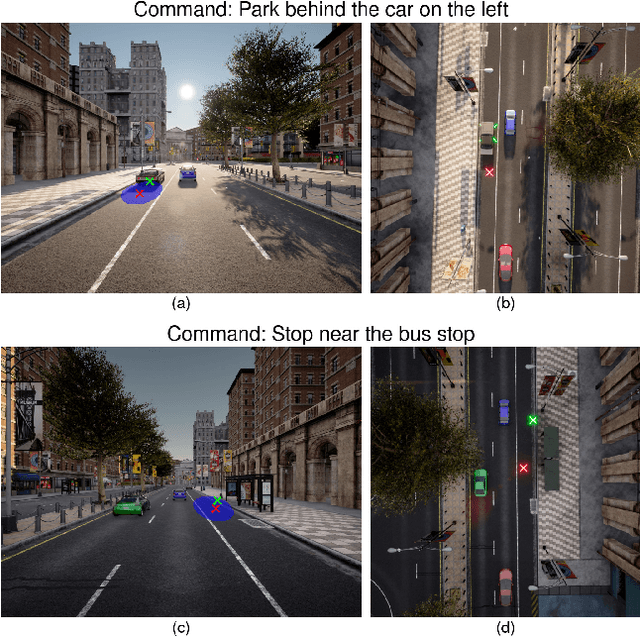
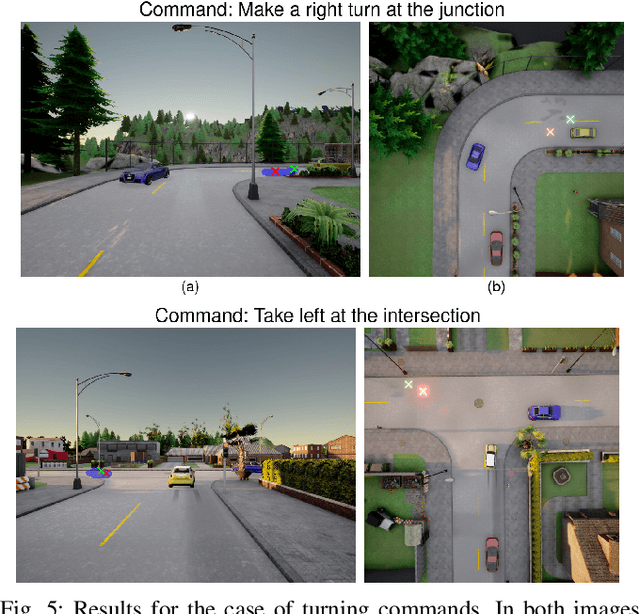
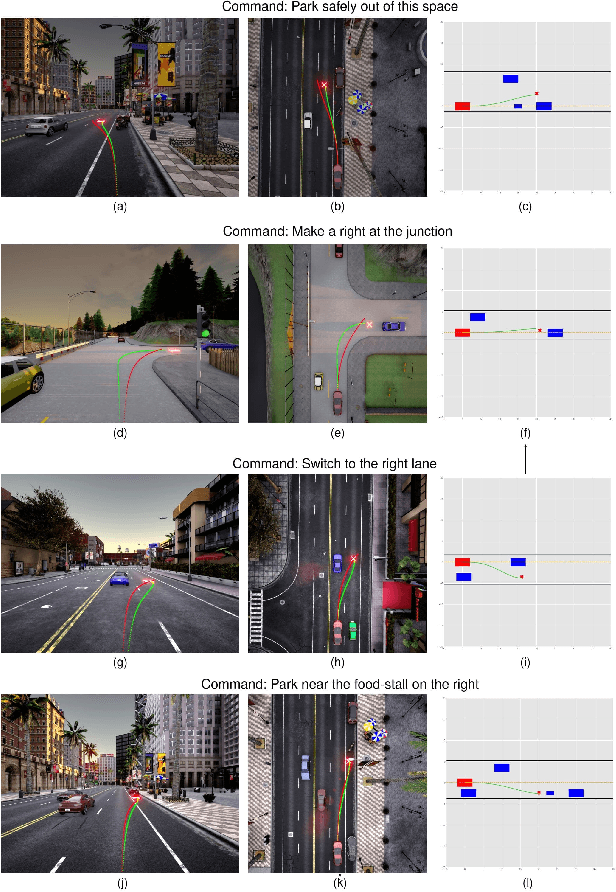
Existing Vision-Language models (VLMs) estimate either long-term trajectory waypoints or a set of control actions as a reactive solution for closed-loop planning based on their rich scene comprehension. However, these estimations are coarse and are subjective to their "world understanding" which may generate sub-optimal decisions due to perception errors. In this paper, we introduce LeGo-Drive, which aims to address this issue by estimating a goal location based on the given language command as an intermediate representation in an end-to-end setting. The estimated goal might fall in a non-desirable region, like on top of a car for a parking-like command, leading to inadequate planning. Hence, we propose to train the architecture in an end-to-end manner, resulting in iterative refinement of both the goal and the trajectory collectively. We validate the effectiveness of our method through comprehensive experiments conducted in diverse simulated environments. We report significant improvements in standard autonomous driving metrics, with a goal reaching Success Rate of 81%. We further showcase the versatility of LeGo-Drive across different driving scenarios and linguistic inputs, underscoring its potential for practical deployment in autonomous vehicles and intelligent transportation systems.
Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization
Mar 28, 2024



Sampling trajectories from a distribution followed by ranking them based on a specified cost function is a common approach in autonomous driving. Typically, the sampling distribution is hand-crafted (e.g a Gaussian, or a grid). Recently, there have been efforts towards learning the sampling distribution through generative models such as Conditional Variational Autoencoder (CVAE). However, these approaches fail to capture the multi-modality of the driving behaviour due to the Gaussian latent prior of the CVAE. Thus, in this paper, we re-imagine the distribution learning through vector quantized variational autoencoder (VQ-VAE), whose discrete latent-space is well equipped to capture multi-modal sampling distribution. The VQ-VAE is trained with demonstration data of optimal trajectories. We further propose a differentiable optimization based safety filter to minimally correct the VQVAE sampled trajectories to ensure collision avoidance. We use backpropagation through the optimization layers in a self-supervised learning set-up to learn good initialization and optimal parameters of the safety filter. We perform extensive comparisons with state-of-the-art CVAE-based baseline in dense and aggressive traffic scenarios and show a reduction of up to 12 times in collision-rate while being competitive in driving speeds.
End-to-End Learning of Behavioural Inputs for Autonomous Driving in Dense Traffic
Oct 23, 2023



Trajectory sampling in the Frenet(road-aligned) frame, is one of the most popular methods for motion planning of autonomous vehicles. It operates by sampling a set of behavioural inputs, such as lane offset and forward speed, before solving a trajectory optimization problem conditioned on the sampled inputs. The sampling is handcrafted based on simple heuristics, does not adapt to driving scenarios, and is oblivious to the capabilities of downstream trajectory planners. In this paper, we propose an end-to-end learning of behavioural input distribution from expert demonstrations or in a self-supervised manner. Our core novelty lies in embedding a custom differentiable trajectory optimizer as a layer in neural networks, allowing us to update behavioural inputs by considering the optimizer's feedback. Moreover, our end-to-end approach also ensures that the learned behavioural inputs aid the convergence of the optimizer. We improve the state-of-the-art in the following aspects. First, we show that learned behavioural inputs substantially decrease collision rate while improving driving efficiency over handcrafted approaches. Second, our approach outperforms model predictive control methods based on sampling-based optimization.
AMSwarmX: Safe Swarm Coordination in CompleX Environments via Implicit Non-Convex Decomposition of the Obstacle-Free Space
Oct 13, 2023



Quadrotor motion planning in complex environments leverage the concept of safe flight corridor (SFC) to facilitate static obstacle avoidance. Typically, SFCs are constructed through convex decomposition of the environment's free space into cuboids, convex polyhedra, or spheres. However, when dealing with a quadrotor swarm, such SFCs can be overly conservative, substantially limiting the available free space for quadrotors to coordinate. This paper presents an Alternating Minimization-based approach that does not require building a conservative free-space approximation. Instead, both static and dynamic collision constraints are treated in a unified manner. Dynamic collisions are handled based on shared position trajectories of the quadrotors. Static obstacle avoidance is coupled with distance queries from the Octomap, providing an implicit non-convex decomposition of free space. As a result, our approach is scalable to arbitrary complex environments. Through extensive comparisons in simulation, we demonstrate a $60\%$ improvement in success rate, an average $1.8\times$ reduction in mission completion time, and an average $23\times$ reduction in per-agent computation time compared to SFC-based approaches. We also experimentally validated our approach using a Crazyflie quadrotor swarm of up to 12 quadrotors in obstacle-rich environments. The code, supplementary materials, and videos are released for reference.
Hilbert Space Embedding-based Trajectory Optimization for Multi-Modal Uncertain Obstacle Trajectory Prediction
Oct 12, 2023

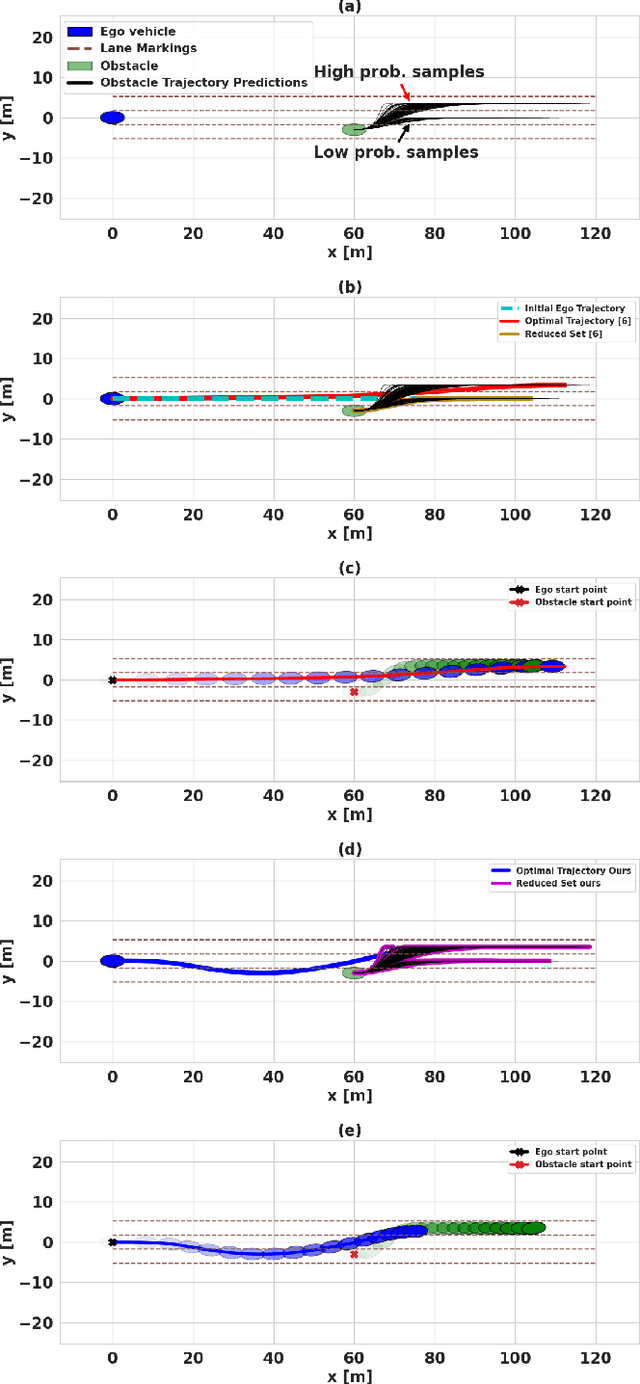
Safe autonomous driving critically depends on how well the ego-vehicle can predict the trajectories of neighboring vehicles. To this end, several trajectory prediction algorithms have been presented in the existing literature. Many of these approaches output a multi-modal distribution of obstacle trajectories instead of a single deterministic prediction to account for the underlying uncertainty. However, existing planners cannot handle the multi-modality based on just sample-level information of the predictions. With this motivation, this paper proposes a trajectory optimizer that can leverage the distributional aspects of the prediction in a computationally tractable and sample-efficient manner. Our optimizer can work with arbitrarily complex distributions and thus can be used with output distribution represented as a deep neural network. The core of our approach is built on embedding distribution in Reproducing Kernel Hilbert Space (RKHS), which we leverage in two ways. First, we propose an RKHS embedding approach to select probable samples from the obstacle trajectory distribution. Second, we rephrase chance-constrained optimization as distribution matching in RKHS and propose a novel sampling-based optimizer for its solution. We validate our approach with hand-crafted and neural network-based predictors trained on real-world datasets and show improvement over the existing stochastic optimization approaches in safety metrics.
PRIEST: Projection Guided Sampling-Based Optimization For Autonomous Navigation
Sep 15, 2023Efficient navigation in unknown and dynamic environments is crucial for expanding the application domain of mobile robots. The core challenge stems from the nonavailability of a feasible global path for guiding optimization-based local planners. As a result, existing local planners often get trapped in poor local minima. In this paper, we present a novel optimizer that can explore multiple homotopies to plan high-quality trajectories over long horizons while still being fast enough for real-time applications. We build on the gradient-free paradigm by augmenting the trajectory sampling strategy with a projection optimization that guides the samples toward a feasible region. As a result, our approach can recover from the frequently encountered pathological cases wherein all the sampled trajectories lie in the high-cost region. Furthermore, we also show that our projection optimization has a highly parallelizable structure that can be easily accelerated over GPUs. We push the state-of-the-art in the following respects. Over the navigation stack of the Robot Operating System (ROS), we show an improvement of 7-13% in success rate and up to two times in total travel time metric. On the same benchmarks and metrics, our approach achieves up to 44% improvement over MPPI and its recent variants. On simple point-to-point navigation tasks, our optimizer is up to two times more reliable than SOTA gradient-based solvers, as well as sampling-based approaches such as the Cross-Entropy Method (CEM) and VPSTO. Codes: https://github.com/fatemeh-rastgar/PRIEST
AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms in Cluttered Environments
Mar 08, 2023



This paper presents a scalable online algorithm to generate safe and kinematically feasible trajectories for quadrotor swarms. Existing approaches rely on linearizing Euclidean distance-based collision constraints and on axis-wise decoupling of kinematic constraints to reduce the trajectory optimization problem for each quadrotor to a quadratic program (QP). This conservative approximation often fails to find a solution in cluttered environments. We present a novel alternative that handles collision constraints without linearization and kinematic constraints in their quadratic form while still retaining the QP form. We achieve this by reformulating the constraints in a polar form and applying an Alternating Minimization algorithm to the resulting problem. Through extensive simulation results, we demonstrate that, as compared to Sequential Convex Programming (SCP) baselines, our approach achieves on average a 72% improvement in success rate, a 36% reduction in mission time, and a 42 times faster per-agent computation time. We also show that collision constraints derived from discrete-time barrier functions (BF) can be incorporated, leading to different safety behaviours without significant computational overhead. Moreover, our optimizer outperforms the state-of-the-art optimal control solver ACADO in handling BF constraints with a 31 times faster per-agent computation time and a 44% reduction in mission time on average. We experimentally validated our approach on a Crazyflie quadrotor swarm of up to 12 quadrotors. The code with supplementary material and video are released for reference.
Bi-Level Optimization Augmented with Conditional Variational Autoencoder for Autonomous Driving in Dense Traffic
Dec 05, 2022



Autonomous driving has a natural bi-level structure. The goal of the upper behavioural layer is to provide appropriate lane change, speeding up, and braking decisions to optimize a given driving task. However, this layer can only indirectly influence the driving efficiency through the lower-level trajectory planner, which takes in the behavioural inputs to produce motion commands. Existing sampling-based approaches do not fully exploit the strong coupling between the behavioural and planning layer. On the other hand, end-to-end Reinforcement Learning (RL) can learn a behavioural layer while incorporating feedback from the lower-level planner. However, purely data-driven approaches often fail in safety metrics in unseen environments. This paper presents a novel alternative; a parameterized bi-level optimization that jointly computes the optimal behavioural decisions and the resulting downstream trajectory. Our approach runs in real-time using a custom GPU-accelerated batch optimizer, and a Conditional Variational Autoencoder learnt warm-start strategy. Extensive simulations show that our approach outperforms state-of-the-art model predictive control and RL approaches in terms of collision rate while being competitive in driving efficiency.
Leveraging Distributional Bias for Reactive Collision Avoidance under Uncertainty: A Kernel Embedding Approach
Aug 05, 2022



Many commodity sensors that measure the robot and dynamic obstacle's state have non-Gaussian noise characteristics. Yet, many current approaches treat the underlying-uncertainty in motion and perception as Gaussian, primarily to ensure computational tractability. On the other hand, existing planners working with non-Gaussian uncertainty do not shed light on leveraging distributional characteristics of motion and perception noise, such as bias for efficient collision avoidance. This paper fills this gap by interpreting reactive collision avoidance as a distribution matching problem between the collision constraint violations and Dirac Delta distribution. To ensure fast reactivity in the planner, we embed each distribution in Reproducing Kernel Hilbert Space and reformulate the distribution matching as minimizing the Maximum Mean Discrepancy (MMD) between the two distributions. We show that evaluating the MMD for a given control input boils down to just matrix-matrix products. We leverage this insight to develop a simple control sampling approach for reactive collision avoidance with dynamic and uncertain obstacles. We advance the state-of-the-art in two respects. First, we conduct an extensive empirical study to show that our planner can infer distributional bias from sample-level information. Consequently, it uses this insight to guide the robot to good homotopy. We also highlight how a Gaussian approximation of the underlying uncertainty can lose the bias estimate and guide the robot to unfavorable states with a high collision probability. Second, we show tangible comparative advantages of the proposed distribution matching approach for collision avoidance with previous non-parametric and Gaussian approximated methods of reactive collision avoidance.