 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAurélie Clodic
Ontological component-based description of robot capabilities
Jun 13, 2023

A key aspect of a robot's knowledge base is self-awareness about what it is capable of doing. It allows to define which tasks it can be assigned to and which it cannot. We will refer to this knowledge as the Capability concept. As capabilities stems from the components the robot owns, they can be linked together. In this work, we hypothesize that this concept can be inferred from the components rather than merely linked to them. Therefore, we introduce an ontological means of inferring the agent's capabilities based on the components it owns as well as low-level capabilities. This inference allows the agent to acknowledge what it is able to do in a responsive way and it is generalizable to external entities the agent can carry for example. To initiate an action, the robot needs to link its capabilities with external entities. To do so, it needs to infer affordance relations from its capabilities as well as the external entity's dispositions. This work is part of a broader effort to integrate social affordances into a Human-Robot collaboration context and is an extension of an already existing ontology.
MuMMER: Socially Intelligent Human-Robot Interaction in Public Spaces
Sep 15, 2019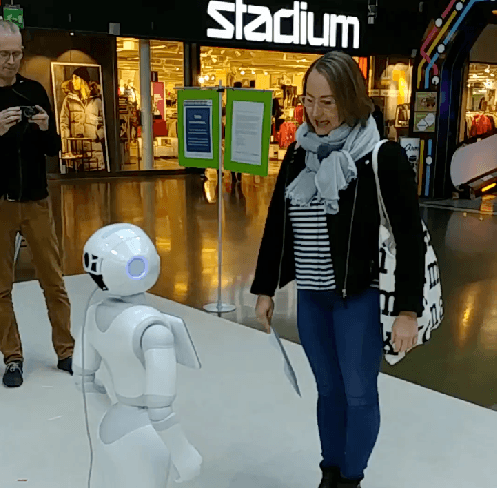
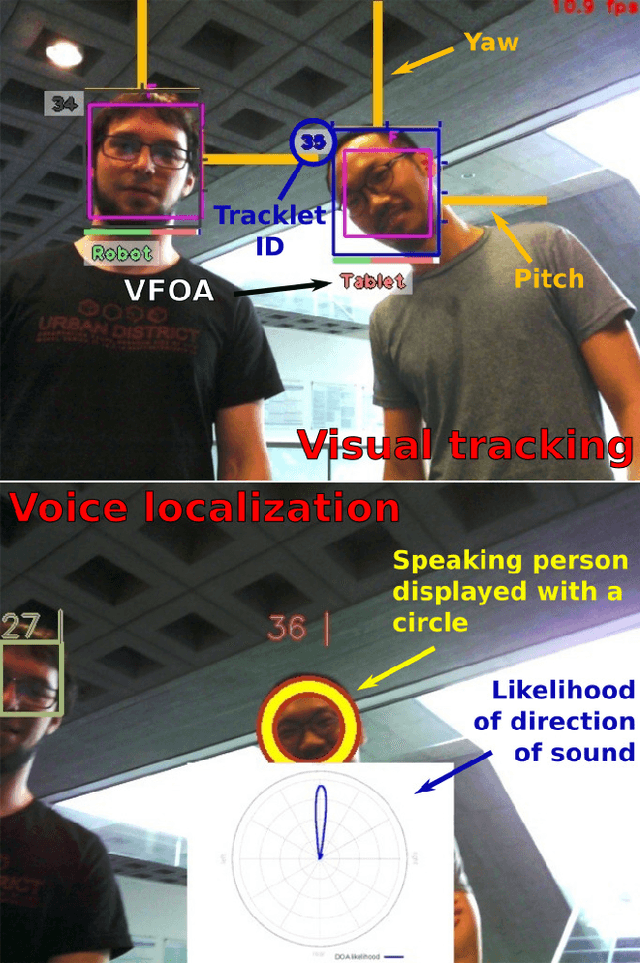
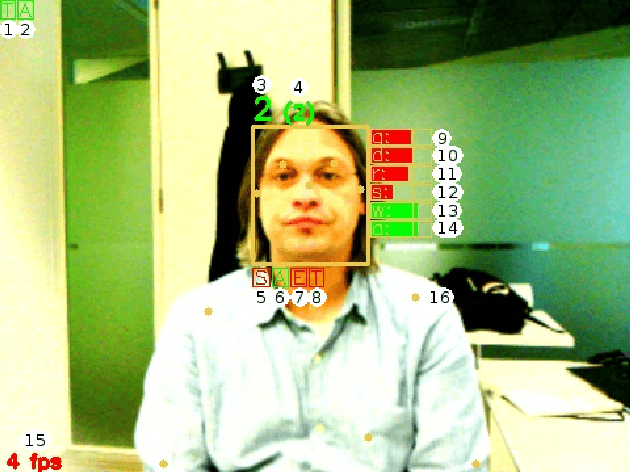
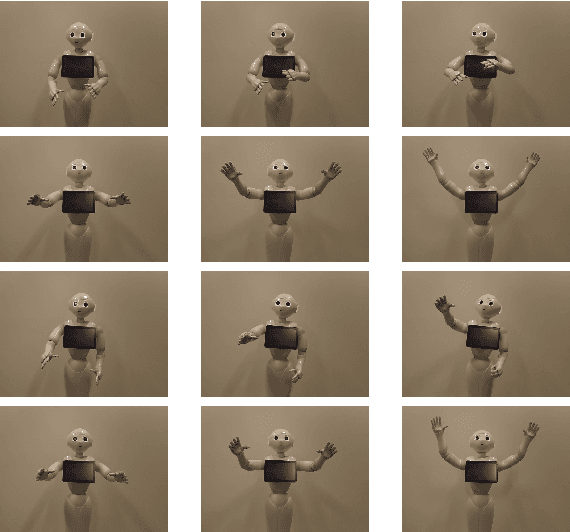
In the EU-funded MuMMER project, we have developed a social robot designed to interact naturally and flexibly with users in public spaces such as a shopping mall. We present the latest version of the robot system developed during the project. This system encompasses audio-visual sensing, social signal processing, conversational interaction, perspective taking, geometric reasoning, and motion planning. It successfully combines all these components in an overarching framework using the Robot Operating System (ROS) and has been deployed to a shopping mall in Finland interacting with customers. In this paper, we describe the system components, their interplay, and the resulting robot behaviours and scenarios provided at the shopping mall.
Some essential skills and their combination in an architecture for a cognitive and interactive robot
Mar 02, 2016
The topic of joint actions has been deeply studied in the context of Human-Human interaction in order to understand how humans cooperate. Creating autonomous robots that collaborate with humans is a complex problem, where it is relevant to apply what has been learned in the context of Human-Human interaction. The question is what skills to implement and how to integrate them in order to build a cognitive architecture, allowing a robot to collaborate efficiently and naturally with humans. In this paper, we first list a set of skills that we consider essential for Joint Action, then we analyze the problem from the robot's point of view and discuss how they can be instantiated in human-robot scenarios. Finally, we open the discussion on how to integrate such skills into a cognitive architecture for human-robot collaborative problem solving and task achievement.