 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoyi Song
Repairing Human Trust by Promptly Correcting Robot Mistakes with An Attention Transfer Model
Mar 14, 2021
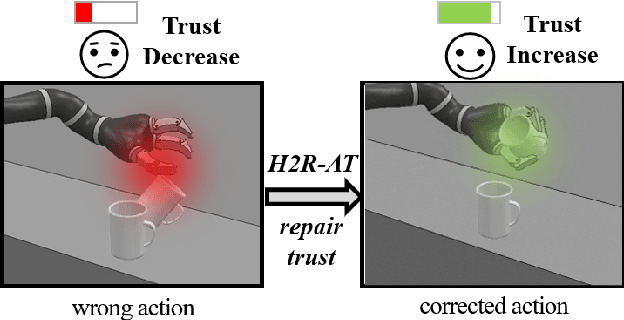
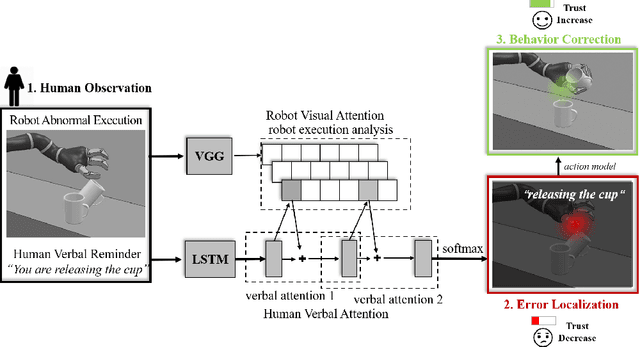
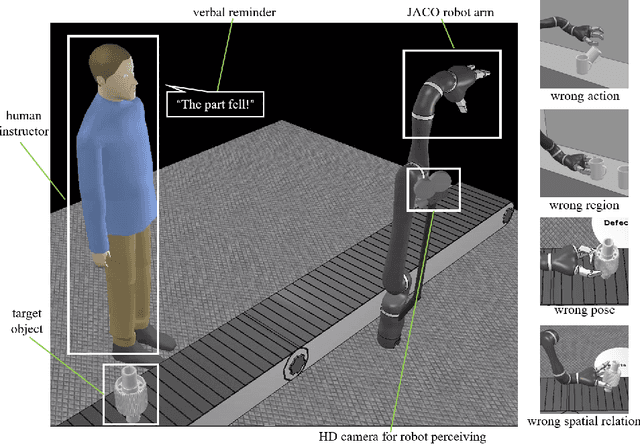
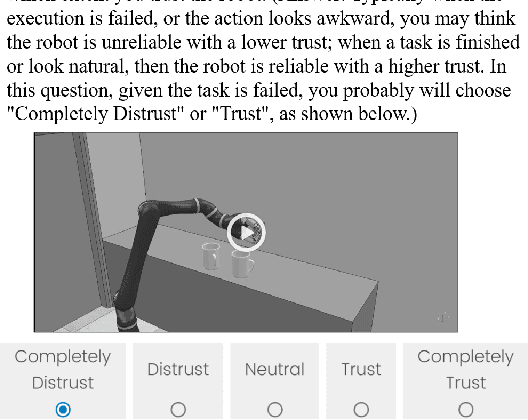
In human-robot collaboration (HRC), human trust in the robot is the human expectation that a robot executes tasks with desired performance. A higher-level trust increases the willingness of a human operator to assign tasks, share plans, and reduce the interruption during robot executions, thereby facilitating human-robot integration both physically and mentally. However, due to real-world disturbances, robots inevitably make mistakes, decreasing human trust and further influencing collaboration. Trust is fragile and trust loss is triggered easily when robots show incapability of task executions, making the trust maintenance challenging. To maintain human trust, in this research, a trust repair framework is developed based on a human-to-robot attention transfer (H2R-AT) model and a user trust study. The rationale of this framework is that a prompt mistake correction restores human trust. With H2R-AT, a robot localizes human verbal concerns and makes prompt mistake corrections to avoid task failures in an early stage and to finally improve human trust. User trust study measures trust status before and after the behavior corrections to quantify the trust loss. Robot experiments were designed to cover four typical mistakes, wrong action, wrong region, wrong pose, and wrong spatial relation, validated the accuracy of H2R-AT in robot behavior corrections; a user trust study with $252$ participants was conducted, and the changes in trust levels before and after corrections were evaluated. The effectiveness of the human trust repairing was evaluated by the mistake correction accuracy and the trust improvement.
Human-to-Robot Attention Transfer for Robot Execution Failure Avoidance Using Stacked Neural Networks
Feb 11, 2020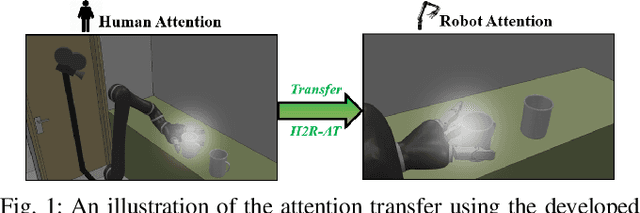
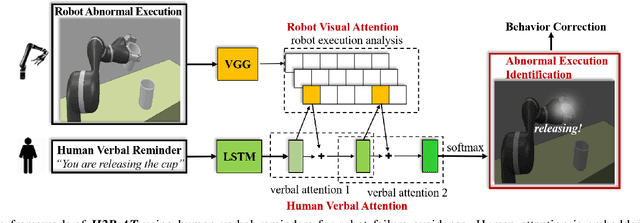
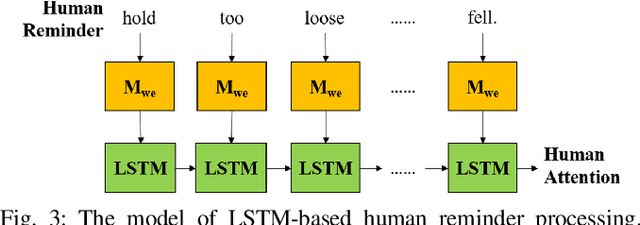
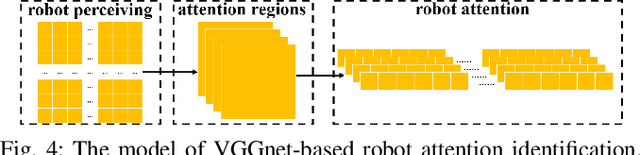
Due to world dynamics and hardware uncertainty, robots inevitably fail in task executions, leading to undesired or even dangerous executions. To avoid failures for improved robot performance, it is critical to identify and correct robot abnormal executions in an early stage. However, limited by reasoning capability and knowledge level, it is challenging for a robot to self diagnose and correct their abnormal behaviors. To solve this problem, a novel method is proposed, human-to-robot attention transfer (H2R-AT) to seek help from a human. H2R-AT is developed based on a novel stacked neural networks model, transferring human attention embedded in verbal reminders to robot attention embedded in robot visual perceiving. With the attention transfer from a human, a robot understands what and where human concerns are to identify and correct its abnormal executions. To validate the effectiveness of H2R-AT, two representative task scenarios, "serve water for a human in a kitchen" and "pick up a defective gear in a factory" with abnormal robot executions, were designed in an open-access simulation platform V-REP; $252$ volunteers were recruited to provide about 12000 verbal reminders to learn and test the attention transfer model H2R-AT. With an accuracy of $73.68\%$ in transferring attention and accuracy of $66.86\%$ in avoiding robot execution failures, the effectiveness of H2R-AT was validated.