 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClarence De. Silva
SRM: An Efficient Framework for Autonomous Robotic Exploration in Indoor Environments
Dec 24, 2018
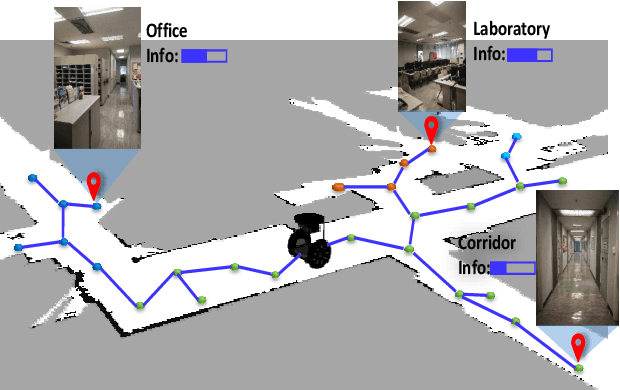
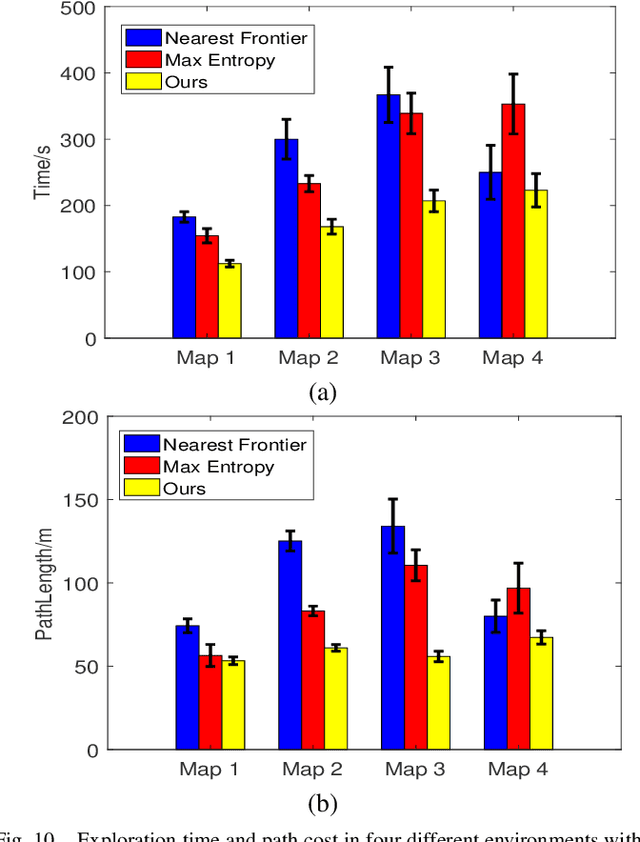
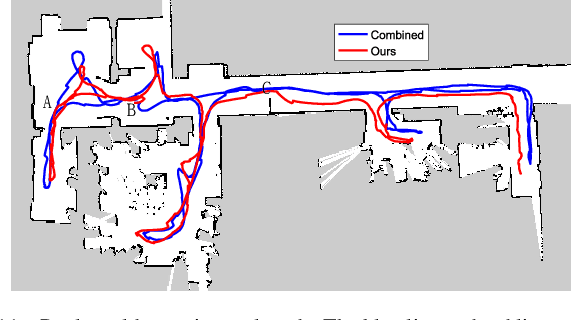
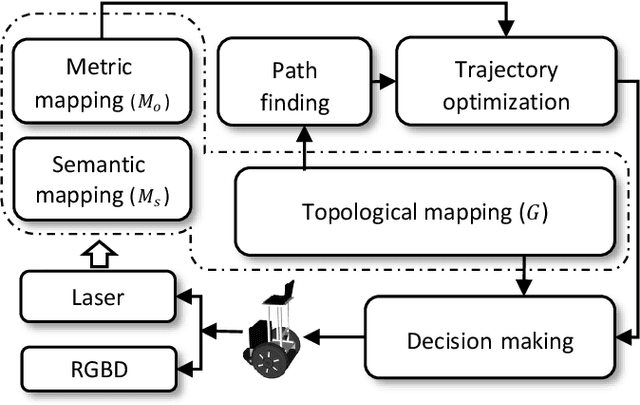
In this paper, we propose an integrated framework for the autonomous robotic exploration in indoor environments. Specially, we present a hybrid map, named Semantic Road Map (SRM), to represent the topological structure of the explored environment and facilitate decision-making in the exploration. The SRM is built incrementally along with the exploration process. It is a graph structure with collision-free nodes and edges that are generated within the sensor coverage. Moreover, each node has a semantic label and the expected information gain at that location. Based on the concise SRM, we present a novel and effective decision-making model to determine the next-best-target (NBT) during the exploration. The model concerns the semantic information, the information gain, and the path cost to the target location. We use the nodes of SRM to represent the candidate targets, which enables the target evaluation to be performed directly on the SRM. With the SRM, both the information gain of a node and the path cost to the node can be obtained efficiently. Besides, we adopt the cross-entropy method to optimize the path to make it more informative. We conduct experimental studies in both simulated and real-world environments, which demonstrate the effectiveness of the proposed method.