 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDaniel Tanneberg
To Help or Not to Help: LLM-based Attentive Support for Human-Robot Group Interactions
Mar 19, 2024
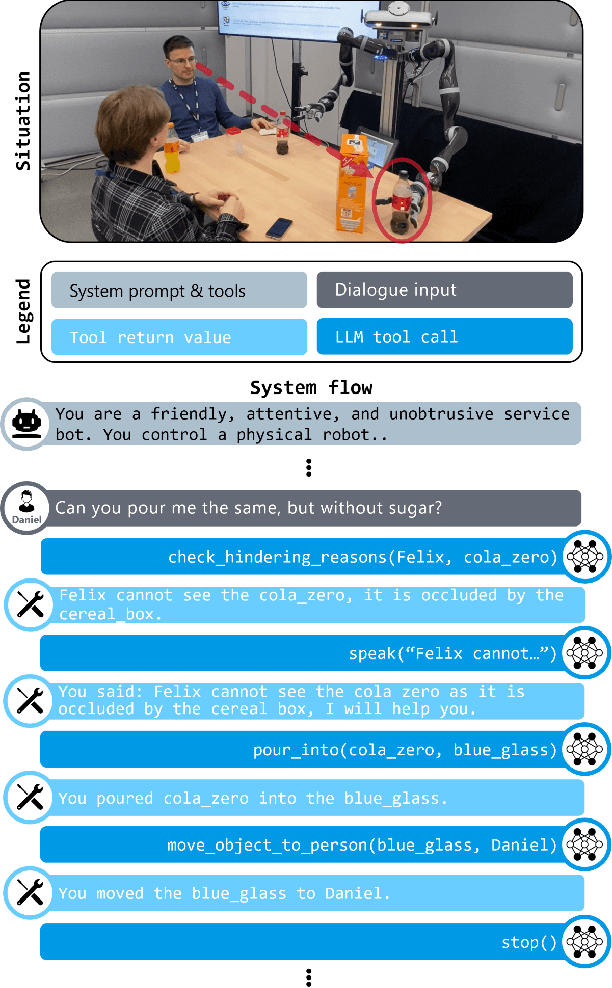
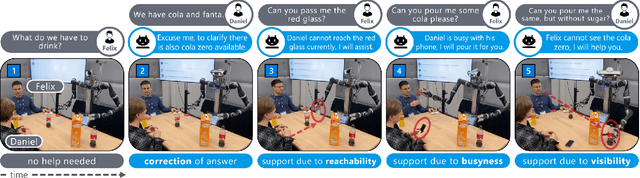
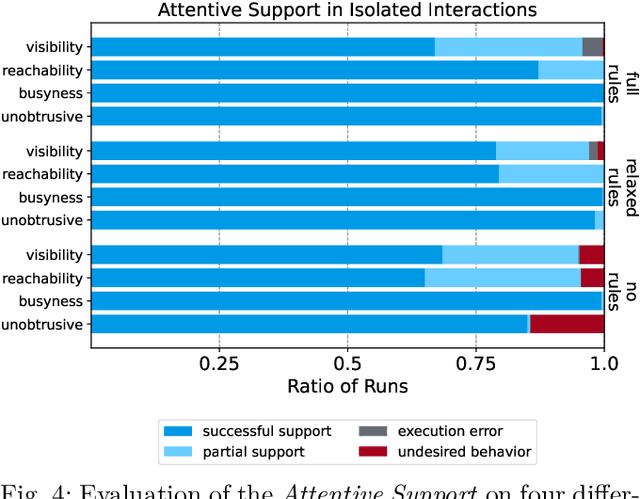
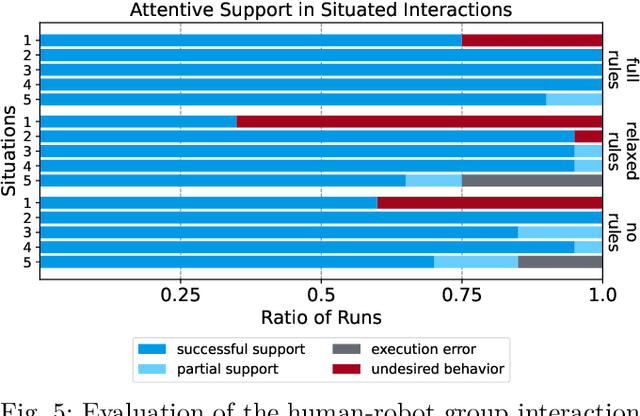
How can a robot provide unobtrusive physical support within a group of humans? We present Attentive Support, a novel interaction concept for robots to support a group of humans. It combines scene perception, dialogue acquisition, situation understanding, and behavior generation with the common-sense reasoning capabilities of Large Language Models (LLMs). In addition to following user instructions, Attentive Support is capable of deciding when and how to support the humans, and when to remain silent to not disturb the group. With a diverse set of scenarios, we show and evaluate the robot's attentive behavior, which supports and helps the humans when required, while not disturbing if no help is needed.
Large Language Models for Multi-Modal Human-Robot Interaction
Jan 26, 2024This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating "atomics" for actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach.
CoPAL: Corrective Planning of Robot Actions with Large Language Models
Oct 11, 2023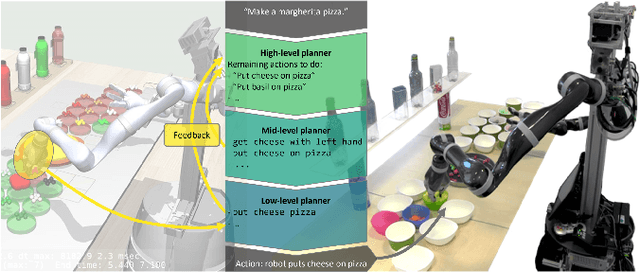
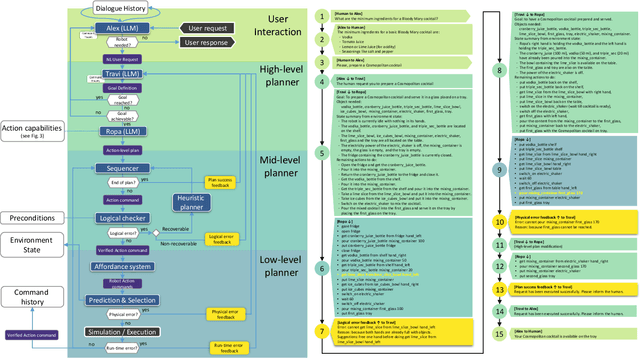
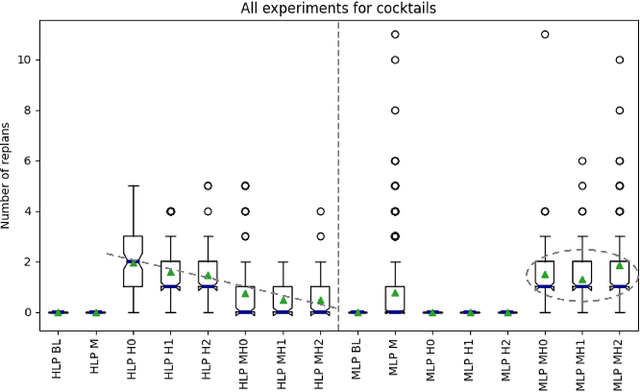
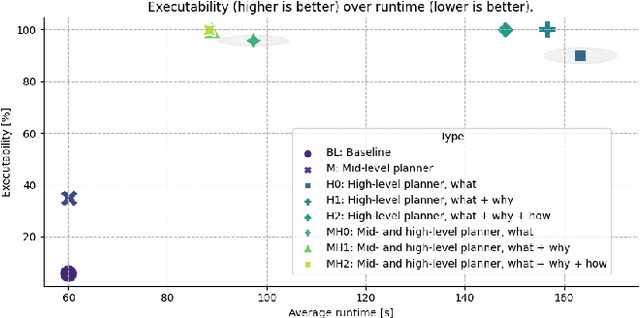
In the pursuit of fully autonomous robotic systems capable of taking over tasks traditionally performed by humans, the complexity of open-world environments poses a considerable challenge. Addressing this imperative, this study contributes to the field of Large Language Models (LLMs) applied to task and motion planning for robots. We propose a system architecture that orchestrates a seamless interplay between multiple cognitive levels, encompassing reasoning, planning, and motion generation. At its core lies a novel replanning strategy that handles physically grounded, logical, and semantic errors in the generated plans. We demonstrate the efficacy of the proposed feedback architecture, particularly its impact on executability, correctness, and time complexity via empirical evaluation in the context of a simulation and two intricate real-world scenarios: blocks world, barman and pizza preparation.
Learning Type-Generalized Actions for Symbolic Planning
Aug 09, 2023Symbolic planning is a powerful technique to solve complex tasks that require long sequences of actions and can equip an intelligent agent with complex behavior. The downside of this approach is the necessity for suitable symbolic representations describing the state of the environment as well as the actions that can change it. Traditionally such representations are carefully hand-designed by experts for distinct problem domains, which limits their transferability to different problems and environment complexities. In this paper, we propose a novel concept to generalize symbolic actions using a given entity hierarchy and observed similar behavior. In a simulated grid-based kitchen environment, we show that type-generalized actions can be learned from few observations and generalize to novel situations. Incorporating an additional on-the-fly generalization mechanism during planning, unseen task combinations, involving longer sequences, novel entities and unexpected environment behavior, can be solved.
Intention estimation from gaze and motion features for human-robot shared-control object manipulation
Aug 18, 2022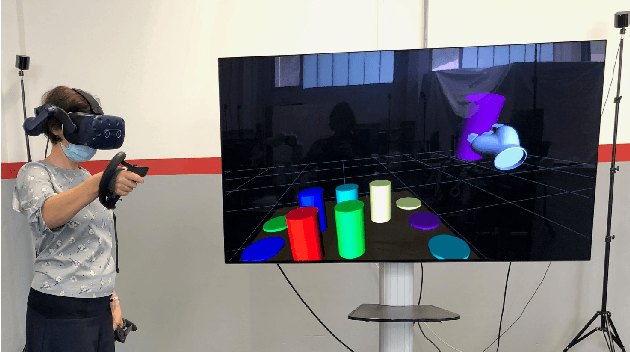

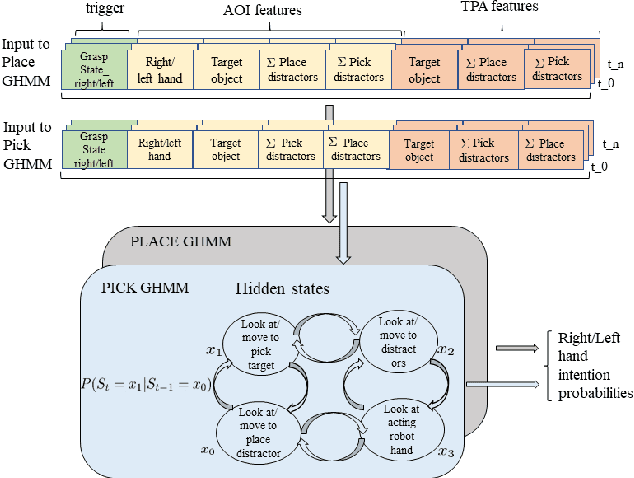

Shared control can help in teleoperated object manipulation by assisting with the execution of the user's intention. To this end, robust and prompt intention estimation is needed, which relies on behavioral observations. Here, an intention estimation framework is presented, which uses natural gaze and motion features to predict the current action and the target object. The system is trained and tested in a simulated environment with pick and place sequences produced in a relatively cluttered scene and with both hands, with possible hand-over to the other hand. Validation is conducted across different users and hands, achieving good accuracy and earliness of prediction. An analysis of the predictive power of single features shows the predominance of the grasping trigger and the gaze features in the early identification of the current action. In the current framework, the same probabilistic model can be used for the two hands working in parallel and independently, while a rule-based model is proposed to identify the resulting bimanual action. Finally, limitations and perspectives of this approach to more complex, full-bimanual manipulations are discussed.
Evolutionary Training and Abstraction Yields Algorithmic Generalization of Neural Computers
May 17, 2021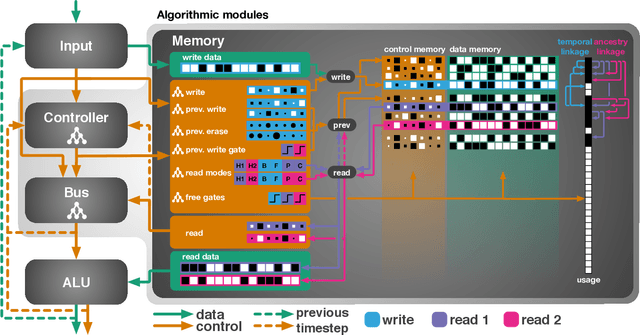
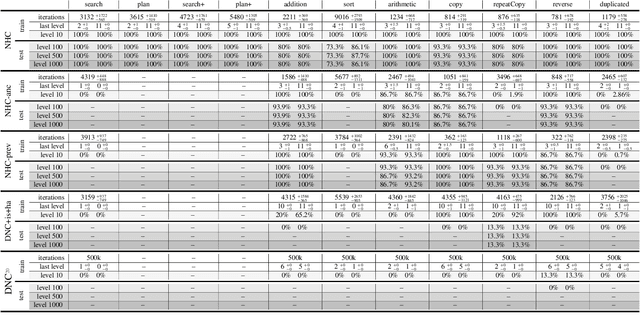
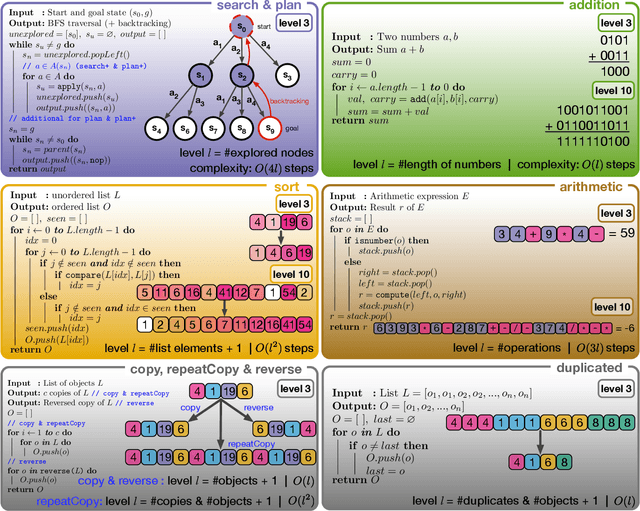
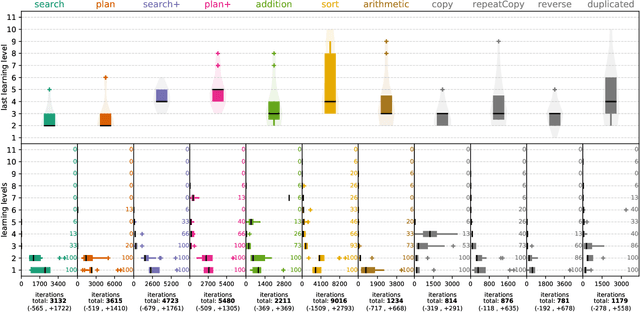
A key feature of intelligent behaviour is the ability to learn abstract strategies that scale and transfer to unfamiliar problems. An abstract strategy solves every sample from a problem class, no matter its representation or complexity -- like algorithms in computer science. Neural networks are powerful models for processing sensory data, discovering hidden patterns, and learning complex functions, but they struggle to learn such iterative, sequential or hierarchical algorithmic strategies. Extending neural networks with external memories has increased their capacities in learning such strategies, but they are still prone to data variations, struggle to learn scalable and transferable solutions, and require massive training data. We present the Neural Harvard Computer (NHC), a memory-augmented network based architecture, that employs abstraction by decoupling algorithmic operations from data manipulations, realized by splitting the information flow and separated modules. This abstraction mechanism and evolutionary training enable the learning of robust and scalable algorithmic solutions. On a diverse set of 11 algorithms with varying complexities, we show that the NHC reliably learns algorithmic solutions with strong generalization and abstraction: perfect generalization and scaling to arbitrary task configurations and complexities far beyond seen during training, and being independent of the data representation and the task domain.
* Nature Machine Intelligence
SKID RAW: Skill Discovery from Raw Trajectories
Mar 26, 2021
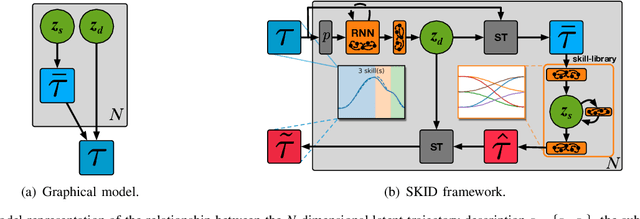
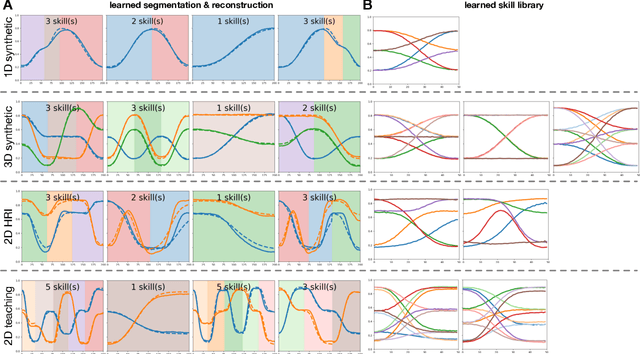
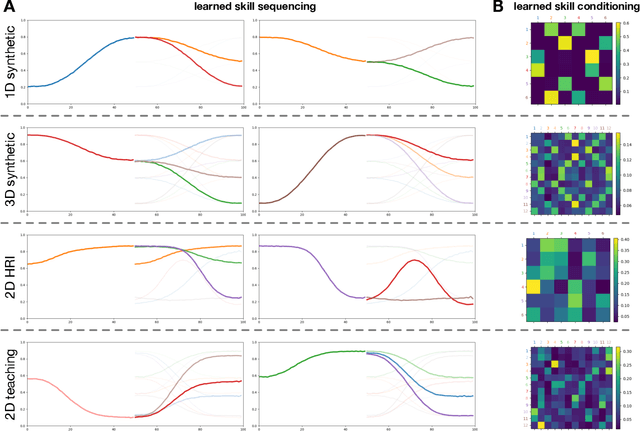
Integrating robots in complex everyday environments requires a multitude of problems to be solved. One crucial feature among those is to equip robots with a mechanism for teaching them a new task in an easy and natural way. When teaching tasks that involve sequences of different skills, with varying order and number of these skills, it is desirable to only demonstrate full task executions instead of all individual skills. For this purpose, we propose a novel approach that simultaneously learns to segment trajectories into reoccurring patterns and the skills to reconstruct these patterns from unlabelled demonstrations without further supervision. Moreover, the approach learns a skill conditioning that can be used to understand possible sequences of skills, a practical mechanism to be used in, for example, human-robot-interactions for a more intelligent and adaptive robot behaviour. The Bayesian and variational inference based approach is evaluated on synthetic and real human demonstrations with varying complexities and dimensionality, showing the successful learning of segmentations and skill libraries from unlabelled data.
Model-Based Quality-Diversity Search for Efficient Robot Learning
Aug 11, 2020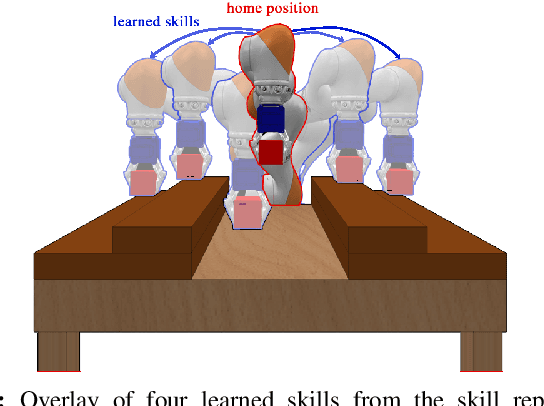
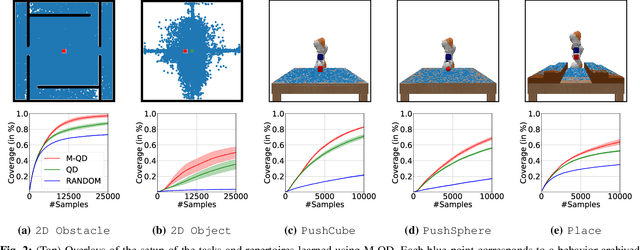
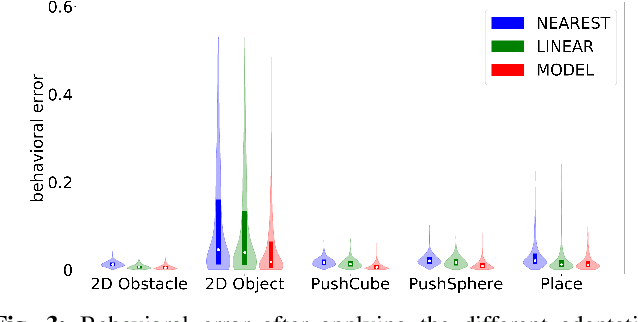
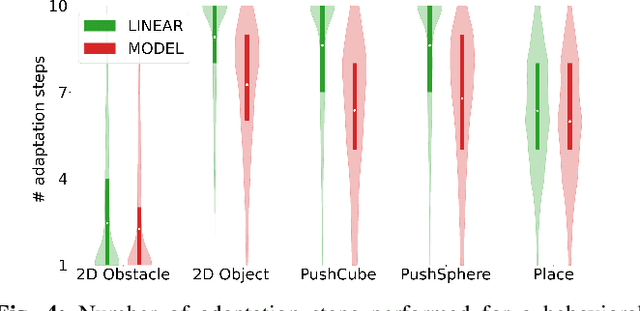
Despite recent progress in robot learning, it still remains a challenge to program a robot to deal with open-ended object manipulation tasks. One approach that was recently used to autonomously generate a repertoire of diverse skills is a novelty based Quality-Diversity~(QD) algorithm. However, as most evolutionary algorithms, QD suffers from sample-inefficiency and, thus, it is challenging to apply it in real-world scenarios. This paper tackles this problem by integrating a neural network that predicts the behavior of the perturbed parameters into a novelty based QD algorithm. In the proposed Model-based Quality-Diversity search (M-QD), the network is trained concurrently to the repertoire and is used to avoid executing unpromising actions in the novelty search process. Furthermore, it is used to adapt the skills of the final repertoire in order to generalize the skills to different scenarios. Our experiments show that enhancing a QD algorithm with such a forward model improves the sample-efficiency and performance of the evolutionary process and the skill adaptation.
Learning Algorithmic Solutions to Symbolic Planning Tasks with a Neural Computer
Oct 30, 2019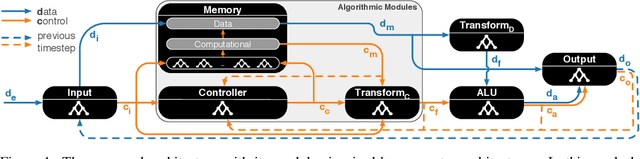

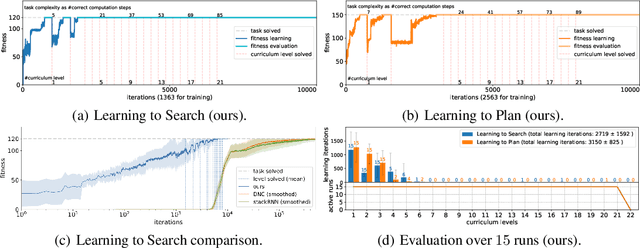

A key feature of intelligent behavior is the ability to learn abstract strategies that transfer to unfamiliar problems. Therefore, we present a novel architecture, based on memory-augmented networks, that is inspired by the von Neumann and Harvard architectures of modern computers. This architecture enables the learning of abstract algorithmic solutions via Evolution Strategies in a reinforcement learning setting. Applied to Sokoban, sliding block puzzle and robotic manipulation tasks, we show that the architecture can learn algorithmic solutions with strong generalization and abstraction: scaling to arbitrary task configurations and complexities, and being independent of both the data representation and the task domain.
Intrinsic Motivation and Mental Replay enable Efficient Online Adaptation in Stochastic Recurrent Networks
Oct 23, 2018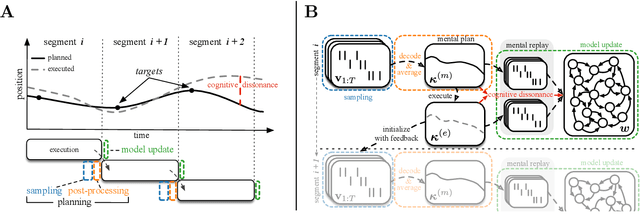

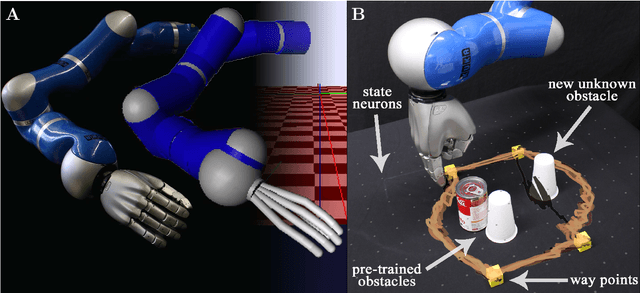

Autonomous robots need to interact with unknown, unstructured and changing environments, constantly facing novel challenges. Therefore, continuous online adaptation for lifelong-learning and the need of sample-efficient mechanisms to adapt to changes in the environment, the constraints, the tasks, or the robot itself are crucial. In this work, we propose a novel framework for probabilistic online motion planning with online adaptation based on a bio-inspired stochastic recurrent neural network. By using learning signals which mimic the intrinsic motivation signalcognitive dissonance in addition with a mental replay strategy to intensify experiences, the stochastic recurrent network can learn from few physical interactions and adapts to novel environments in seconds. We evaluate our online planning and adaptation framework on an anthropomorphic KUKA LWR arm. The rapid online adaptation is shown by learning unknown workspace constraints sample-efficiently from few physical interactions while following given way points.