 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepak Vasisht
S4: Self-Supervised Sensing Across the Spectrum
May 02, 2024
Satellite image time series (SITS) segmentation is crucial for many applications like environmental monitoring, land cover mapping and agricultural crop type classification. However, training models for SITS segmentation remains a challenging task due to the lack of abundant training data, which requires fine grained annotation. We propose S4 a new self-supervised pre-training approach that significantly reduces the requirement for labeled training data by utilizing two new insights: (a) Satellites capture images in different parts of the spectrum such as radio frequencies, and visible frequencies. (b) Satellite imagery is geo-registered allowing for fine-grained spatial alignment. We use these insights to formulate pre-training tasks in S4. We also curate m2s2-SITS, a large-scale dataset of unlabeled, spatially-aligned, multi-modal and geographic specific SITS that serves as representative pre-training data for S4. Finally, we evaluate S4 on multiple SITS segmentation datasets and demonstrate its efficacy against competing baselines while using limited labeled data.
Radarize: Large-Scale Radar SLAM for Indoor Environments
Nov 19, 2023
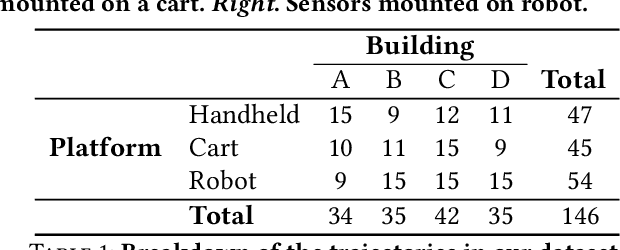
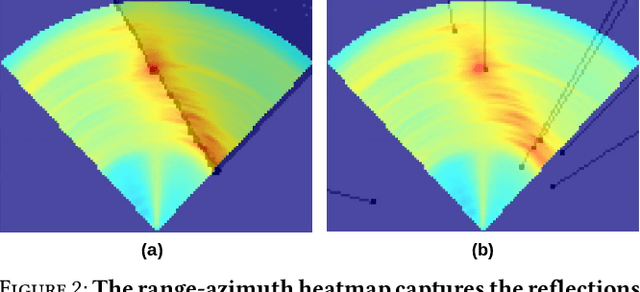
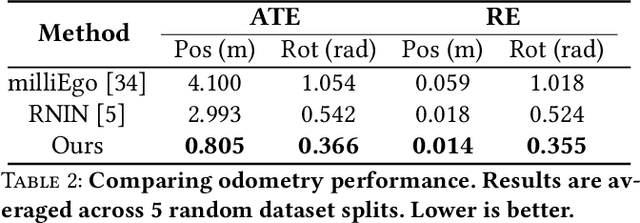
We present Radarize, a self-contained SLAM pipeline for indoor environments that uses only a low-cost commodity single-chip mmWave radar. Our radar-native approach leverages phenomena unique to radio frequencies, such as doppler shift-based odometry, to improve performance. We evaluate our method on a large-scale dataset of 146 trajectories spanning 4 campus buildings, totaling approximately 4680m of travel distance. Our results show that our method outperforms state-of-the-art radar-based approaches by approximately 5x in terms of odometry and 8x in terms of end-to-end SLAM, as measured by absolute trajectory error (ATE), without the need additional sensors such as IMUs or wheel odometry.
BatMobility: Towards Flying Without Seeing for Autonomous Drones
Jul 21, 2023



Unmanned aerial vehicles (UAVs) rely on optical sensors such as cameras and lidar for autonomous operation. However, such optical sensors are error-prone in bad lighting, inclement weather conditions including fog and smoke, and around textureless or transparent surfaces. In this paper, we ask: is it possible to fly UAVs without relying on optical sensors, i.e., can UAVs fly without seeing? We present BatMobility, a lightweight mmWave radar-only perception system for UAVs that eliminates the need for optical sensors. BatMobility enables two core functionalities for UAVs -- radio flow estimation (a novel FMCW radar-based alternative for optical flow based on surface-parallel doppler shift) and radar-based collision avoidance. We build BatMobility using commodity sensors and deploy it as a real-time system on a small off-the-shelf quadcopter running an unmodified flight controller. Our evaluation shows that BatMobility achieves comparable or better performance than commercial-grade optical sensors across a wide range of scenarios.
Packet Reception Probability: Packets That You Can't Decode Can Help Keep You Safe
Jun 02, 2023



This paper provides a robust, scalable Bluetooth Low-Energy (BLE) based indoor localization solution using commodity hardware. While WiFi-based indoor localization has been widely studied, BLE has emerged a key technology for contact-tracing in the current pandemic. To accurately estimate distance using BLE on commercial devices, systems today rely on Receiver Signal Strength Indicator(RSSI) which suffers from sampling bias and multipath effects. We propose a new metric: Packet Reception Probability (PRP) that builds on a counter-intuitive idea that we can exploit packet loss to estimate distance. We localize using a Bayesian-PRP formulation that also incorporates an explicit model of the multipath. To make deployment easy, we do not require any hardware, firmware, or driver-level changes to off-the-shelf devices, and require minimal training. PRP can achieve meter level accuracy with just 6 devices with known locations and 12 training locations. We show that fusing PRP with RSSI is beneficial at short distances < 2m. Beyond 2m, fusion is worse than PRP, as RSSI becomes effectively de-correlated with distance. Robust location accuracy at all distances and ease of deployment with PRP can help enable wide range indoor localization solutions using BLE.
RF-Annotate: Automatic RF-Supervised Image Annotation of Common Objects in Context
Nov 16, 2022



Wireless tags are increasingly used to track and identify common items of interest such as retail goods, food, medicine, clothing, books, documents, keys, equipment, and more. At the same time, there is a need for labelled visual data featuring such items for the purpose of training object detection and recognition models for robots operating in homes, warehouses, stores, libraries, pharmacies, and so on. In this paper, we ask: can we leverage the tracking and identification capabilities of such tags as a basis for a large-scale automatic image annotation system for robotic perception tasks? We present RF-Annotate, a pipeline for autonomous pixel-wise image annotation which enables robots to collect labelled visual data of objects of interest as they encounter them within their environment. Our pipeline uses unmodified commodity RFID readers and RGB-D cameras, and exploits arbitrary small-scale motions afforded by mobile robotic platforms to spatially map RFIDs to corresponding objects in the scene. Our only assumption is that the objects of interest within the environment are pre-tagged with inexpensive battery-free RFIDs costing 3-15 cents each. We demonstrate the efficacy of our pipeline on several RGB-D sequences of tabletop scenes featuring common objects in a variety of indoor environments.
No Size Fits All: Automated Radio Configuration for LPWANs
Sep 10, 2021



Low power long-range networks like LoRa have become increasingly mainstream for Internet of Things deployments. Given the versatility of applications that these protocols enable, they support many data rates and bandwidths. Yet, for a given network that supports hundreds of devices over multiple miles, the network operator typically needs to specify the same configuration or among a small subset of configurations for all the client devices to communicate with the gateway. This one-size-fits-all approach is highly inefficient in large networks. We propose an alternative approach -- we allow network devices to transmit at any data rate they choose. The gateway uses the first few symbols in the preamble to classify the correct data rate, switches its configuration, and then decodes the data. Our design leverages the inherent asymmetry in outdoor IoT deployments where the clients are power-starved and resource-constrained, but the gateway is not. Our gateway design, Proteus, runs a neural network architecture and is backward compatible with existing LoRa protocols. Our experiments reveal that Proteus can identify the correct configuration with over 97% accuracy in both indoor and outdoor deployments. Our network architecture leads to a 3.8 to 11 times increase in throughput for our LoRa testbed.