 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDi Deng
DPMPC-Planner: A real-time UAV trajectory planning framework for complex static environments with dynamic obstacles
Sep 14, 2021
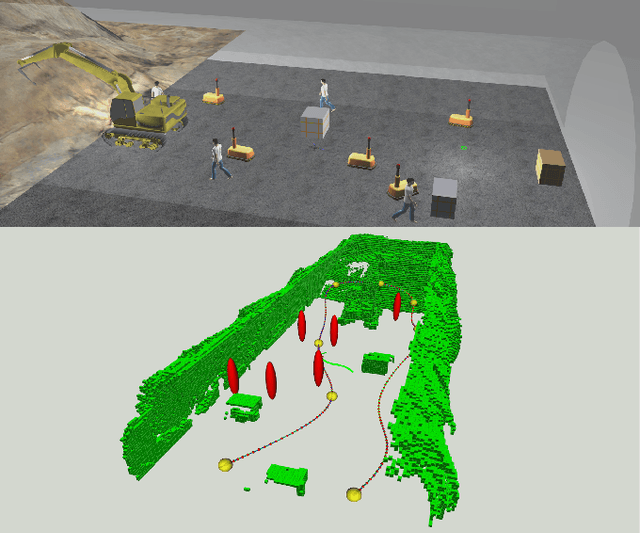
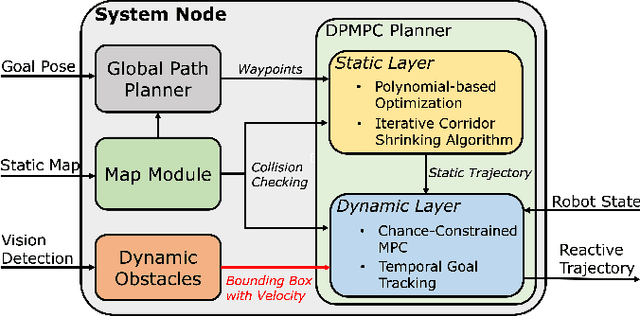
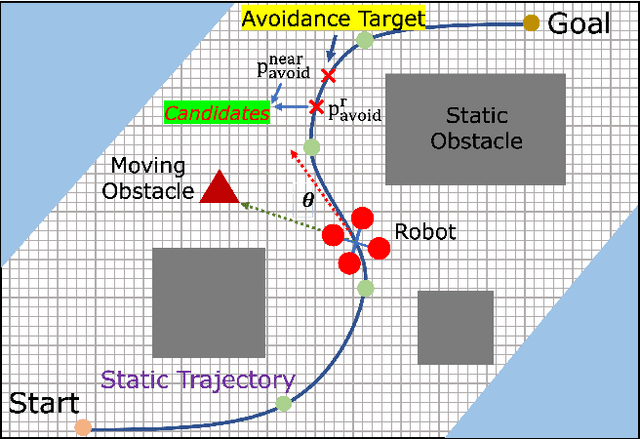
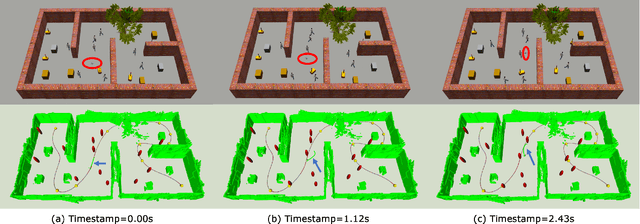
Safe UAV navigation is challenging due to the complex environment structures, dynamic obstacles, and uncertainties from measurement noises and unpredictable moving obstacle behaviors. Although plenty of recent works achieve safe navigation in complex static environments with sophisticated mapping algorithms, such as occupancy map and ESDF map, these methods cannot reliably handle dynamic environments due to the mapping limitation from moving obstacles. To address the limitation, this paper proposes a trajectory planning framework to achieve safe navigation considering complex static environments with dynamic obstacles. To reliably handle dynamic obstacles, we divide the environment representation into static mapping and dynamic object representation, which can be obtained from computer vision methods. Our framework first generates a static trajectory based on the proposed iterative corridor shrinking algorithm. Then, reactive chance-constrained model predictive control with temporal goal tracking is applied to avoid dynamic obstacles with uncertainties. The simulation results in various environments demonstrate the ability of our algorithm to navigate safely in complex static environments with dynamic obstacles.
Robotic Exploration of Unknown 2D Environment Using a Frontier-based Automatic-Differentiable Information Gain Measure
Nov 10, 2020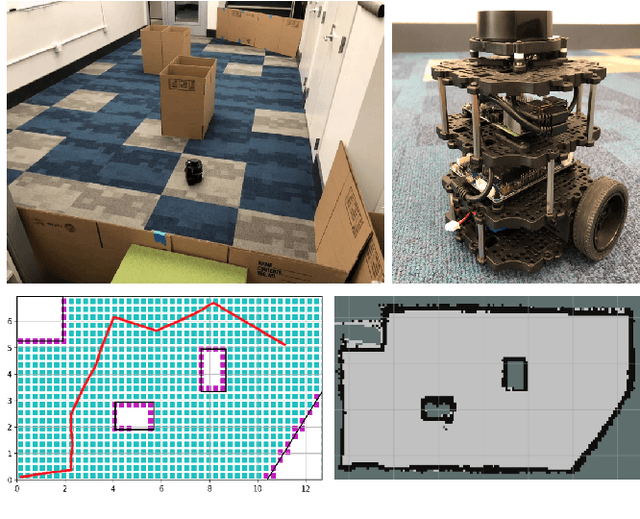


At the heart of path-planning methods for autonomous robotic exploration is a heuristic which encourages exploring unknown regions of the environment. Such heuristics are typically computed using frontier-based or information-theoretic methods. Frontier-based methods define the information gain of an exploration path as the number of boundary cells, or frontiers, which are visible from the path. However, the discrete and non-differentiable nature of this measure of information gain makes it difficult to optimize using gradient-based methods. In contrast, information-theoretic methods define information gain as the mutual information between the sensor's measurements and the explored map. However, computation of the gradient of mutual information involves finite differencing and is thus computationally expensive. This work proposes an exploration planning framework that combines sampling-based path planning and gradient-based path optimization. The main contribution of this framework is a novel reformulation of information gain as a differentiable function. This allows us to simultaneously optimize information gain with other differentiable quality measures, such as smoothness. The proposed planning framework's effectiveness is verified both in simulation and in hardware experiments using a Turtlebot3 Burger robot.
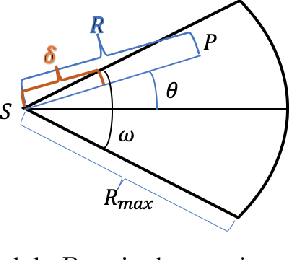
Frontier-based Automatic-differentiable Information Gain Measure for Robotic Exploration of Unknown 3D Environments
Nov 10, 2020

The path planning problem for autonomous exploration of an unknown region by a robotic agent typically employs frontier-based or information-theoretic heuristics. Frontier-based heuristics typically evaluate the information gain of a viewpoint by the number of visible frontier voxels, which is a discrete measure that can only be optimized by sampling. On the other hand, information-theoretic heuristics compute information gain as the mutual information between the map and the sensor's measurement. Although the gradient of such measures can be computed, the computation involves costly numerical differentiation. In this work, we add a novel fuzzy logic filter in the counting of visible frontier voxels surrounding a viewpoint, which allows the gradient of the information gain with respect to the viewpoint to be efficiently computed using automatic differentiation. This enables us to simultaneously optimize information gain with other differentiable quality measures such as path length. Using multiple simulation environments, we demonstrate that the proposed gradient-based optimization method consistently improves the information gain and other quality measures of exploration paths.
Coordinated Aerial-Ground Robot Exploration via Monte-Carlo View Quality Rendering
Nov 10, 2020
We present a framework for a ground-aerial robotic team to explore large, unstructured, and unknown environments. In such exploration problems, the effectiveness of existing exploration-boosting heuristics often scales poorly with the environments' size and complexity. This work proposes a novel framework combining incremental frontier distribution, goal selection with Monte-Carlo view quality rendering, and an automatic-differentiable information gain measure to improve exploration efficiency. Simulated with multiple complex environments, we demonstrate that the proposed method effectively utilizes collaborative aerial and ground robots, consistently guides agents to informative viewpoints, improves exploration paths' information gain, and reduces planning time.
Autonomous UAV Exploration of Dynamic Environments via Incremental Sampling and Probabilistic Roadmap
Oct 14, 2020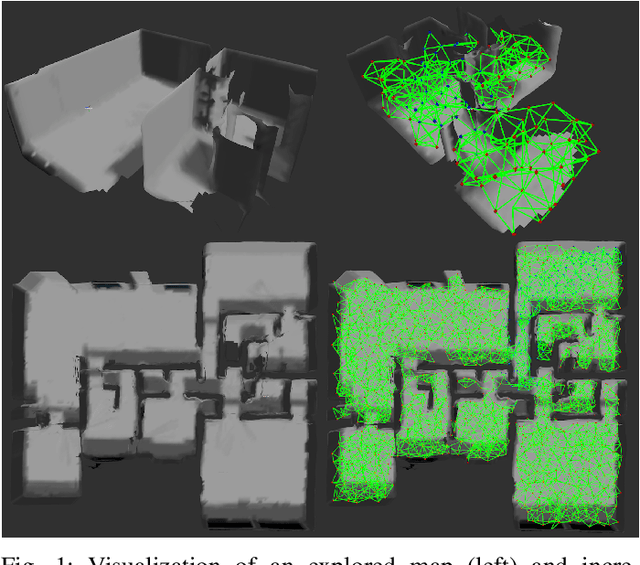
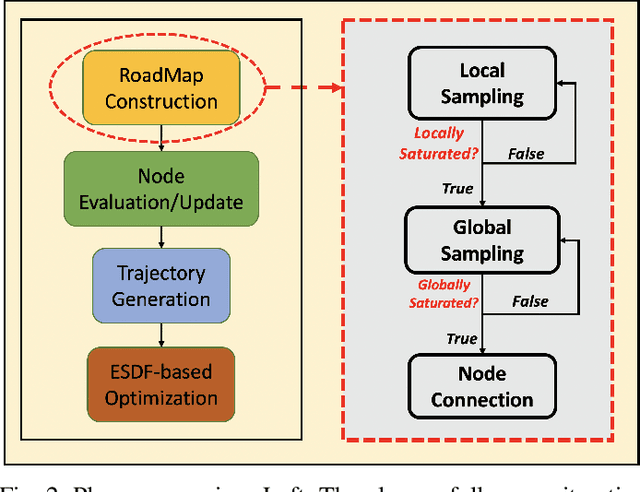
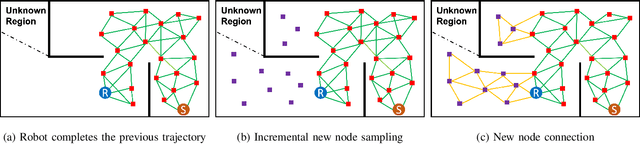
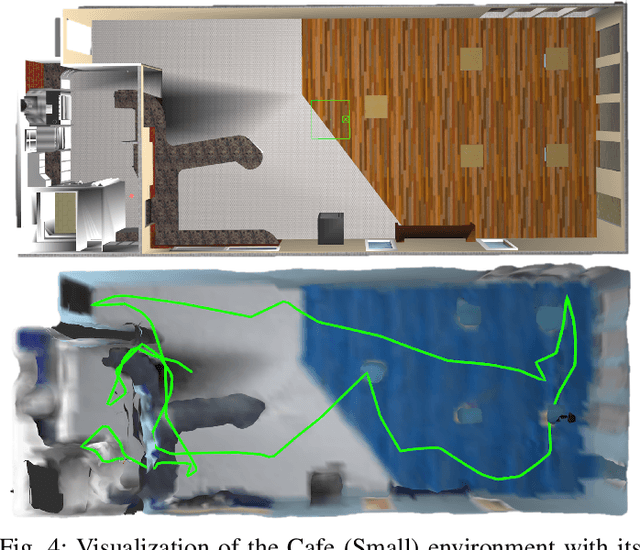
Autonomous exploration requires robots to generate informative trajectories iteratively. Although sampling-based methods are highly efficient in unmanned aerial vehicle exploration, many of these methods do not effectively utilize the sampled information from the previous planning iterations, leading to redundant computation and longer exploration time. Also, few have explicitly shown their exploration ability in dynamic environments even though they can run real-time. To overcome these limitations, we propose a novel dynamic exploration planner (DEP) for exploring unknown environments using incremental sampling and Probabilistic Roadmap (PRM). In our sampling strategy, nodes are added incrementally and distributed evenly in the explored region, yielding the best viewpoints. To further shortening exploration time and ensuring safety, our planner optimizes paths locally and refine it based on the Euclidean Signed Distance Function (ESDF) map. Meanwhile, as the multi-query planner, PRM allows the proposed planner to quickly search alternative paths to avoid dynamic obstacles for safe exploration. Simulation experiments show that our method safely explores dynamic environments and outperforms the frontier-based planner and receding horizon next-best-view planner in terms of exploration time, path length, and computational time.
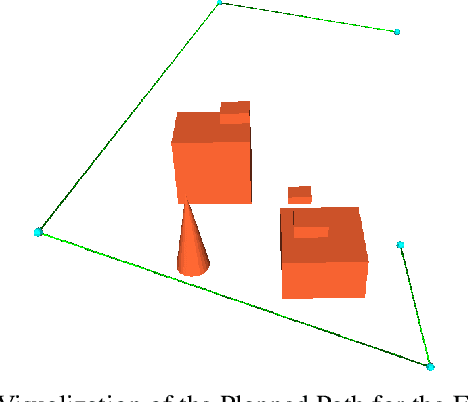
Multi-UAV Coverage Path Planning for the Inspection of Large and Complex Structures
Jul 26, 2020
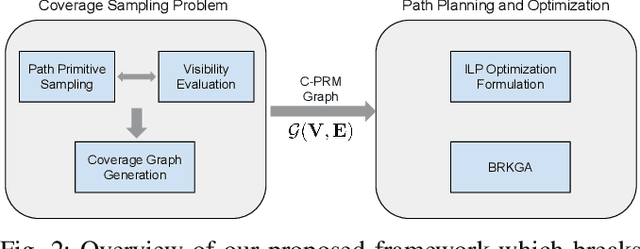
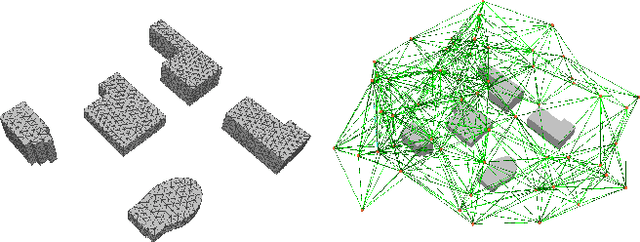
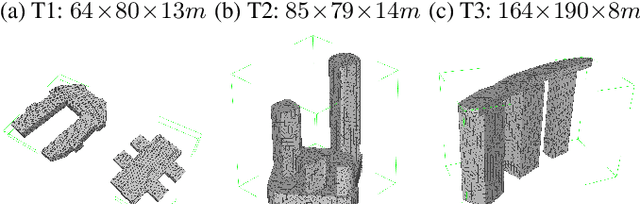
We present a multi-UAV Coverage Path Planning (CPP) framework for the inspection of large-scale, complex 3D structures. In the proposed sampling-based coverage path planning method, we formulate the multi-UAV inspection applications as a multi-agent coverage path planning problem. By combining two NP-hard problems: Set Covering Problem (SCP) and Vehicle Routing Problem (VRP), a Set-Covering Vehicle Routing Problem (SC-VRP) is formulated and subsequently solved by a modified Biased Random Key Genetic Algorithm (BRKGA) with novel, efficient encoding strategies and local improvement heuristics. We test our proposed method for several complex 3D structures with the 3D model extracted from OpenStreetMap. The proposed method outperforms previous methods, by reducing the length of the planned inspection path by up to 48%
Constrained Heterogeneous Vehicle Path Planning for Large-area Coverage
Nov 22, 2019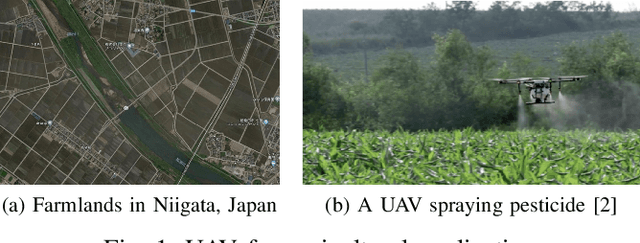

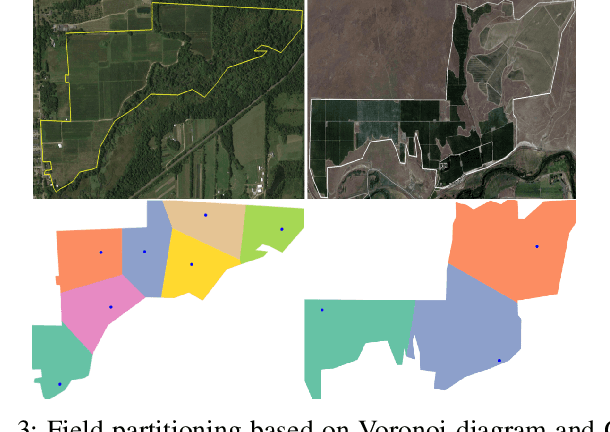
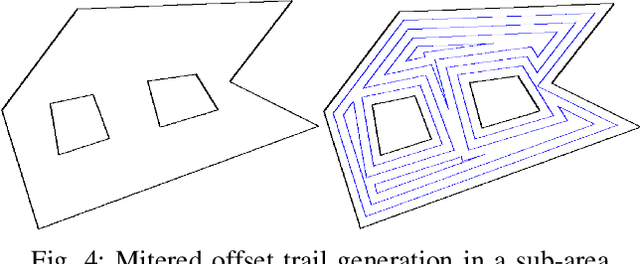
There is a strong demand for covering a large area autonomously by multiple UAVs (Unmanned Aerial Vehicles) supported by a ground vehicle. Limited by UAVs' battery life and communication distance, complete coverage of large areas typically involves multiple take-offs and landings to recharge batteries, and the transportation of UAVs between operation areas by a ground vehicle. In this paper, we introduce a novel large-area-coverage planning framework which collectively optimizes the paths for aerial and ground vehicles. Our method first partitions a large area into sub-areas, each of which a given fleet of UAVs can cover without recharging batteries. UAV operation routes, or trails, are then generated for each sub-area. Next, the assignment of trials to different UAVs and the order in which UAVs visit their assigned trails are simultaneously optimized to minimize the total UAV flight distance. Finally, a ground vehicle transportation path which visits all sub-areas is found by solving an asymmetric traveling salesman problem (ATSP). Although finding the globally optimal trail assignment and transition paths can be formulated as a Mixed Integer Quadratic Program (MIQP), the MIQP is intractable even for small problems. We show that the solution time can be reduced to close-to-real-time levels by first finding a feasible solution using a Random Key Genetic Algorithm (RKGA), which is then locally optimized by solving a much smaller MIQP.
Coverage Path Planning using Path Primitive Sampling and Primitive Coverage Graph for Visual Inspection
Aug 08, 2019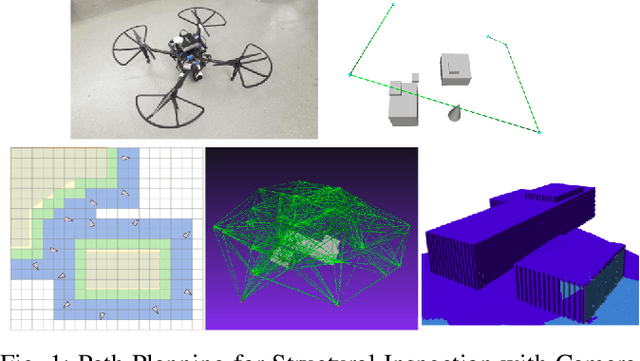
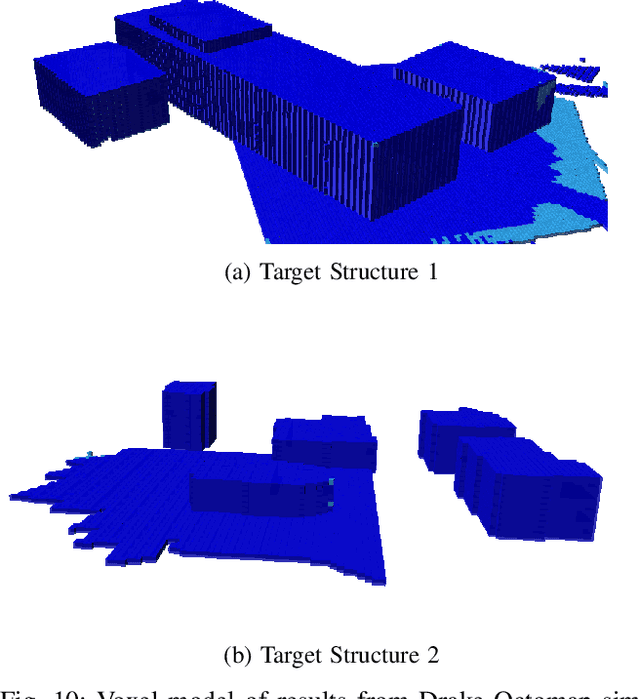

Planning the path to gather the surface information of the target objects is crucial to improve the efficiency of and reduce the overall cost, for visual inspection applications with Unmanned Aerial Vehicles (UAVs). Coverage Path Planning (CPP) problem is often formulated for these inspection applications because of the coverage requirement. Traditionally, researchers usually plan and optimize the viewpoints to capture the surface information first, and then optimize the path to visit the selected viewpoints. In this paper, we propose a novel planning method to directly sample and plan the inspection path for a camera-equipped UAV to acquire visual and geometric information of the target structures as a video stream setting in complex 3D environment. The proposed planning method first generates via-points and path primitives around the target object by using sampling methods based on voxel dilation and subtraction. A novel Primitive Coverage Graph (PCG) is then proposed to encode the topological information, flying distances, and visibility information, with the sampled via-points and path primitives. Finally graph search is performed to find the resultant path in the PCG to complete the inspection task with the coverage requirements. The effectiveness of the proposed method is demonstrated through simulation and field tests in this paper.
Heterogeneous Vehicles Routing for Water Canal Damage Assessment
Mar 07, 2018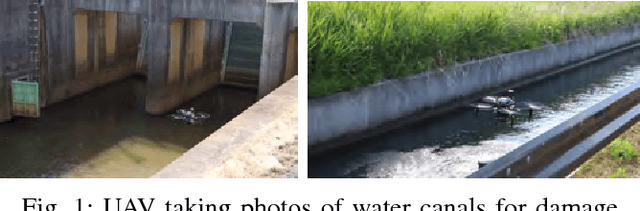

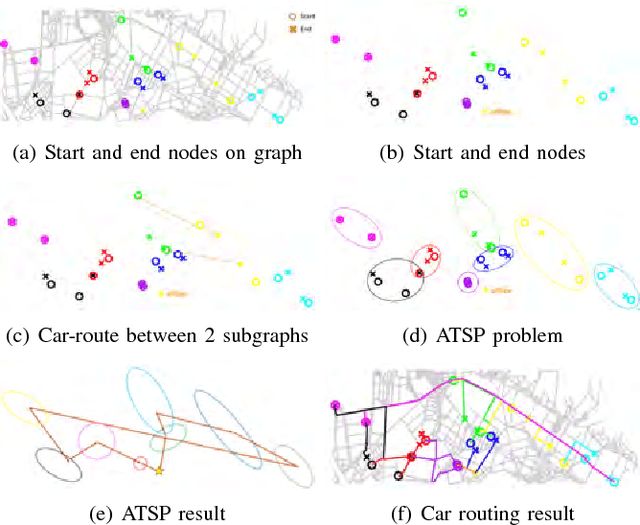
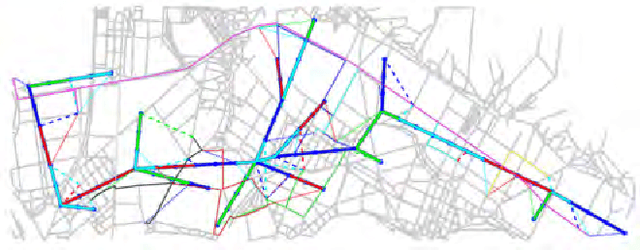
In Japan, inspection of irrigation water canals has been mostly conducted manually. However, the huge demand for more regular inspections as infrastructure ages, coupled with the limited time window available for inspection, has rendered manual inspection increasingly insufficient. With shortened inspection time and reduced labor cost, automated inspection using a combination of unmanned aerial vehicles (UAVs) and ground vehicles (cars) has emerged as an attractive alternative to manual inspection. In this paper, we propose a path planning framework that generates optimal plans for UAVs and cars to inspect water canals in a large agricultural area (tens of square kilometers). In addition to optimality, the paths need to satisfy several constraints, in order to guarantee UAV navigation safety and to abide by local traffic regulations. In the proposed framework, the canal and road networks are first modeled as two graphs, which are then partitioned into smaller subgraphs that can be covered by a given fleet of UAVs within one battery charge. The problem of finding optimal paths for both UAVs and cars on the graphs, subject to the constraints, is formulated as a mixed-integer quadratic program (MIQP). The proposed framework can also quickly generate new plans when a current plan is interrupted. The effectiveness of the proposed framework is validated by simulation results showing the successful generation of plans covering all given canal segments, and the ability to quickly revise the plan when conditions change.