 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeErbo Li
Image Projective Invariants
Jul 19, 2017
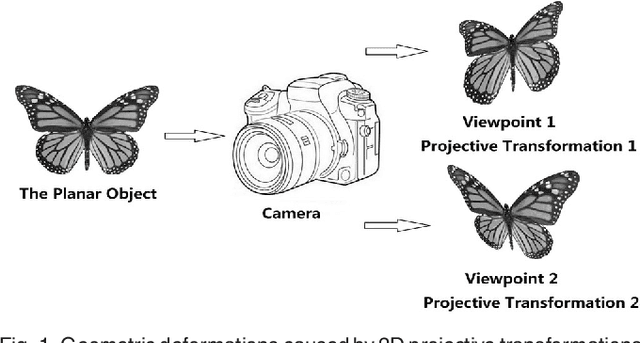

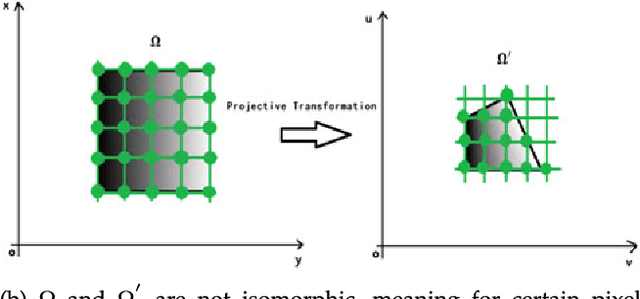
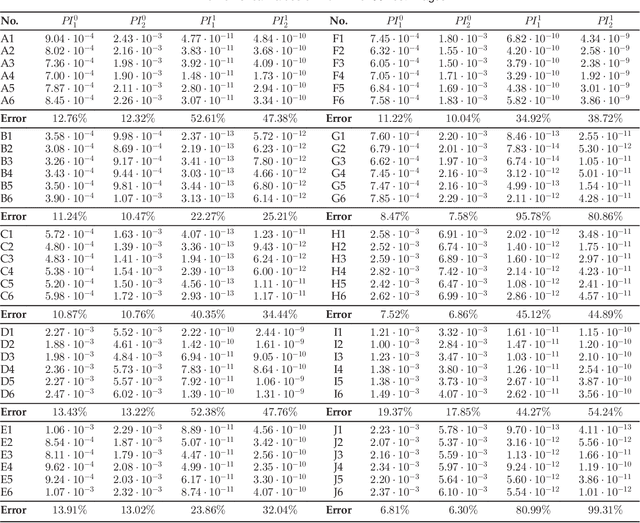
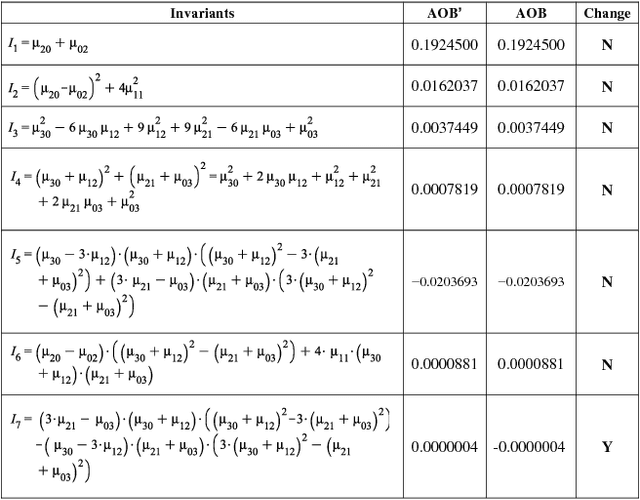
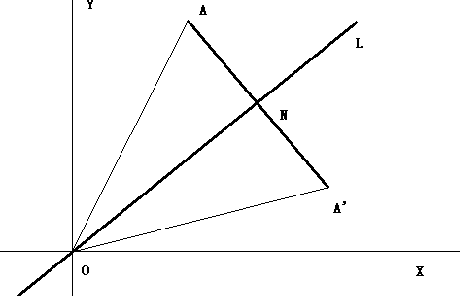
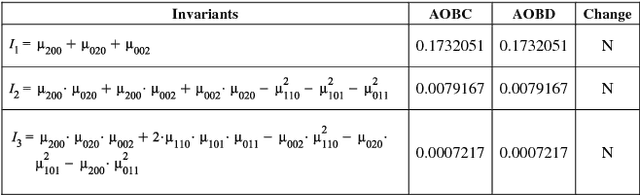
In this paper, we propose relative projective differential invariants (RPDIs) which are invariant to general projective transformations. By using RPDIs and the structural frame of integral invariant, projective weighted moment invariants (PIs) can be constructed very easily. It is first proved that a kind of projective invariants exists in terms of weighted integration of images, with relative differential invariants as the weight functions. Then, some simple instances of PIs are given. In order to ensure the stability and discriminability of PIs, we discuss how to calculate partial derivatives of discrete images more accurately. Since the number of pixels in discrete images before and after the geometric transformation may be different, we design the method to normalize the number of pixels. These ways enhance the performance of PIs. Finally, we carry out some experiments based on synthetic and real image datasets. We choose commonly used moment invariants for comparison. The results indicate that PIs have better performance than other moment invariants in image retrieval and classification. With PIs, one can compare the similarity between images under the projective transformation without knowing the parameters of the transformation, which provides a good tool to shape analysis in image processing, computer vision and pattern recognition.
Reflection Invariant and Symmetry Detection
May 31, 2017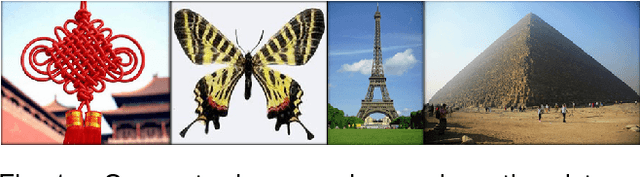
Symmetry detection and discrimination are of fundamental meaning in science, technology, and engineering. This paper introduces reflection invariants and defines the directional moment to detect symmetry for shape analysis and object recognition. And it demonstrates that detection of reflection symmetry can be done in a simple way by solving a trigonometric system derived from the directional moment, and discrimination of reflection symmetry can be achieved by application of the reflection invariants in 2D and 3D. Rotation symmetry can also be determined based on that.The experiments in 2D and 3D, including the regular triangle, the square, and the five Platonic objects, show that all the reflection lines or planes can be deterministically found using directional moments up to order six. This result can be used to simplify the efforts of symmetry detection in research areas, such as protein structure, model retrieval, inverse engineering, and machine vision etc.
Shape DNA: Basic Generating Functions for Geometric Moment Invariants
May 24, 2017Geometric moment invariants (GMIs) have been widely used as basic tool in shape analysis and information retrieval. Their structure and characteristics determine efficiency and effectiveness. Two fundamental building blocks or generating functions (GFs) for invariants are discovered, which are dot product and vector product of point vectors in Euclidean space. The primitive invariants (PIs) can be derived by carefully selecting different products of GFs and calculating the corresponding multiple integrals, which translates polynomials of coordinates of point vectors into geometric moments. Then the invariants themselves are expressed in the form of product of moments. This procedure is just like DNA encoding proteins. All GMIs available in the literature can be decomposed into linear combinations of PIs. This paper shows that Hu's seven well known GMIs in computer vision have a more deep structure, which can be further divided into combination of simpler PIs. In practical uses, low order independent GMIs are of particular interest. In this paper, a set of PIs for similarity transformation and affine transformation in 2D are presented, which are simpler to use, and some of which are newly reported. The discovery of the two generating functions provides a new perspective of better understanding shapes in 2D and 3D Euclidean spaces, and the method proposed can be further extended to higher dimensional spaces and different manifolds, such as curves, surfaces and so on.
Isomorphism between Differential and Moment Invariants under Affine Transform
May 24, 2017The invariant is one of central topics in science, technology and engineering. The differential invariant is essential in understanding or describing some important phenomena or procedures in mathematics, physics, chemistry, biology or computer science etc. The derivation of differential invariants is usually difficult or complicated. This paper reports a discovery that under the affine transform, differential invariants have similar structures with moment invariants up to a scalar function of transform parameters. If moment invariants are known, relative differential invariants can be obtained by the substitution of moments by derivatives with the same order. Whereas moment invariants can be calculated by multiple integrals, this method provides a simple way to derive differential invariants without the need to resolve any equation system. Since the definition of moments on different manifolds or in different dimension of spaces is well established, differential invariants on or in them will also be well defined. Considering that moments have a strong background in mathematics and physics, this technique offers a new view angle to the inner structure of invariants. Projective differential invariants can also be found in this way with a screening process.