 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEric Sihite
Banking Turn of High-DOF Dynamic Morphing Wing Flight by Shifting Structure Response Using Optimization
May 09, 2024
The 3D flight control of a flapping wing robot is a very challenging problem. The robot stabilizes and controls its pose through the aerodynamic forces acting on the wing membrane which has complex dynamics and it is difficult to develop a control method to interact with such a complex system. Bats, in particular, are capable of performing highly agile aerial maneuvers such as tight banking and bounding flight solely using their highly flexible wings. In this work, we develop a control method for a bio-inspired bat robot, the Aerobat, using small low-powered actuators to manipulate the flapping gait and the resulting aerodynamic forces. We implemented a controller based on collocation approach to track a desired roll and perform a banking maneuver to be used in a trajectory tracking controller. This controller is implemented in a simulation to show its performance and feasibility.
Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
May 09, 2024This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.
Dynamic Posture Manipulation During Tumbling for Closed-Loop Heading Angle Control
May 08, 2024Passive tumbling uses natural forces like gravity for efficient travel. But without an active means of control, passive tumblers must rely entirely on external forces. Northeastern University's COBRA is a snake robot that can morph into a ring, which employs passive tumbling to traverse down slopes. However, due to its articulated joints, it is also capable of dynamically altering its posture to manipulate the dynamics of the tumbling locomotion for active steering. This paper presents a modelling and control strategy based on collocation optimization for real-time steering of COBRA's tumbling locomotion. We validate our approach using Matlab simulations.
Loco-Manipulation with Nonimpulsive Contact-Implicit Planning in a Slithering Robot
Apr 12, 2024Object manipulation has been extensively studied in the context of fixed base and mobile manipulators. However, the overactuated locomotion modality employed by snake robots allows for a unique blend of object manipulation through locomotion, referred to as loco-manipulation. The following work presents an optimization approach to solving the loco-manipulation problem based on non-impulsive implicit contact path planning for our snake robot COBRA. We present the mathematical framework and show high-fidelity simulation results and experiments to demonstrate the effectiveness of our approach.
Non-impulsive Contact-Implicit Motion Planning for Morpho-functional Loco-manipulation
Apr 12, 2024Object manipulation has been extensively studied in the context of fixed base and mobile manipulators. However, the overactuated locomotion modality employed by snake robots allows for a unique blend of object manipulation through locomotion, referred to as loco-manipulation. The following work presents an optimization approach to solving the loco-manipulation problem based on non-impulsive implicit contact path planning for our snake robot COBRA. We present the mathematical framework and show high fidelity simulation results for fixed-shape lateral rolling trajectories that demonstrate the object manipulation.
Quadrupedal Locomotion Control On Inclined Surfaces Using Collocation Method
Dec 14, 2023Inspired by Chukars wing-assisted incline running (WAIR), in this work, we employ a high-fidelity model of our Husky Carbon quadrupedal-legged robot to walk over steep slopes of up to 45 degrees. Chukars use the aerodynamic forces generated by their flapping wings to manipulate ground contact forces and traverse steep slopes and even overhangs. By exploiting the thrusters on Husky, we employed a collocation approach to rapidly resolving the joint and thruster actions. Our approach uses a polynomial approximation of the reduced-order dynamics of Husky, called HROM, to quickly and efficiently find optimal control actions that permit high-slope walking without violating friction cone conditions.
How Strong a Kick Should be to Topple Northeastern's Tumbling Robot?
Nov 25, 2023Rough terrain locomotion has remained one of the most challenging mobility questions. In 2022, NASA's Innovative Advanced Concepts (NIAC) Program invited US academic institutions to participate NASA's Breakthrough, Innovative \& Game-changing (BIG) Idea competition by proposing novel mobility systems that can negotiate extremely rough terrain, lunar bumpy craters. In this competition, Northeastern University won NASA's top Artemis Award award by proposing an articulated robot tumbler called COBRA (Crater Observing Bio-inspired Rolling Articulator). This report briefly explains the underlying principles that made COBRA successful in competing with other concepts ranging from cable-driven to multi-legged designs from six other participating US institutions.
Dynamic modeling of wing-assisted inclined running with a morphing multi-modal robot
Nov 16, 2023Robot designs can take many inspirations from nature, where there are many examples of highly resilient and fault-tolerant locomotion strategies to navigate complex terrains by using multi-functional appendages. For example, Chukar and Hoatzin birds can repurpose their wings for quadrupedal walking and wing-assisted incline running (WAIR) to climb steep surfaces. We took inspiration from nature and designed a morphing robot with multi-functional thruster-wheel appendages that allows the robot to change its mode of locomotion by transforming into a rover, quad-rotor, mobile inverted pendulum (MIP), and other modes. In this work, we derive a dynamic model and formulate a nonlinear model predictive controller to perform WAIR to showcase the unique capabilities of our robot. We implemented the model and controller in a numerical simulation and experiments to show their feasibility and the capabilities of our transforming multi-modal robot.
Demonstrating Autonomous 3D Path Planning on a Novel Scalable UGV-UAV Morphing Robot
Aug 01, 2023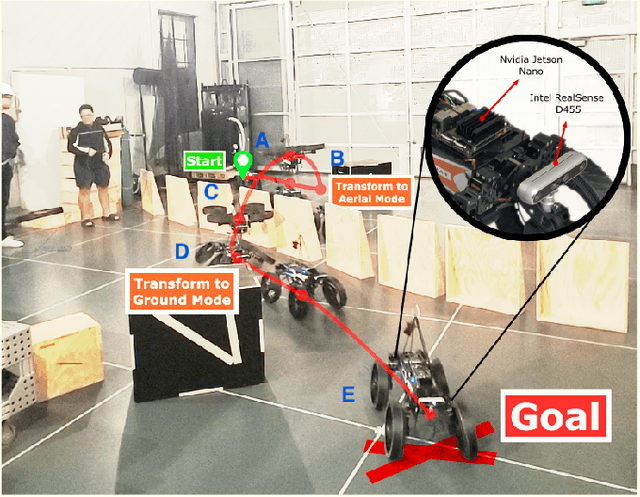
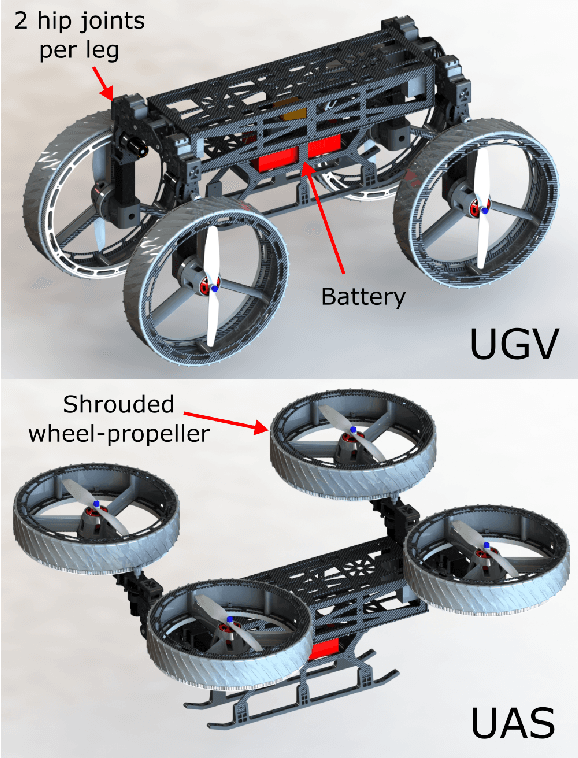
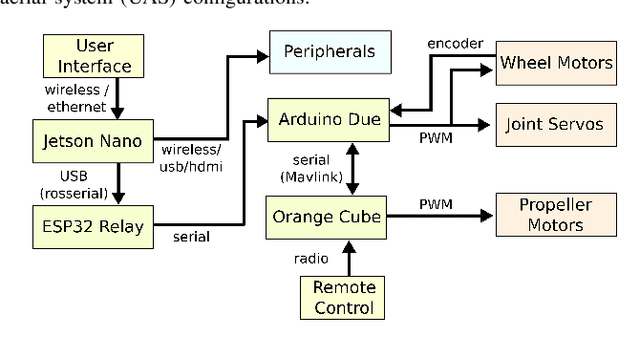
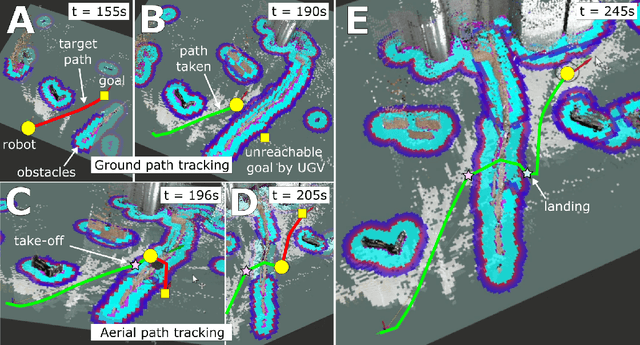
Some animals exhibit multi-modal locomotion capability to traverse a wide range of terrains and environments, such as amphibians that can swim and walk or birds that can fly and walk. This capability is extremely beneficial for expanding the animal's habitat range and they can choose the most energy efficient mode of locomotion in a given environment. The robotic biomimicry of this multi-modal locomotion capability can be very challenging but offer the same advantages. However, the expanded range of locomotion also increases the complexity of performing localization and path planning. In this work, we present our morphing multi-modal robot, which is capable of ground and aerial locomotion, and the implementation of readily available SLAM and path planning solutions to navigate a complex indoor environment.
Hovering Control of Flapping Wings in Tandem with Multi-Rotors
Jul 31, 2023



This work briefly covers our efforts to stabilize the flight dynamics of Northeastern's tailless bat-inspired micro aerial vehicle, Aerobat. Flapping robots are not new. A plethora of examples is mainly dominated by insect-style design paradigms that are passively stable. However, Aerobat, in addition for being tailless, possesses morphing wings that add to the inherent complexity of flight control. The robot can dynamically adjust its wing platform configurations during gait cycles, increasing its efficiency and agility. We employ a guard design with manifold small thrusters to stabilize Aerobat's position and orientation in hovering, a flapping system in tandem with a multi-rotor. For flight control purposes, we take an approach based on assuming the guard cannot observe Aerobat's states. Then, we propose an observer to estimate the unknown states of the guard which are then used for closed-loop hovering control of the Guard-Aerobat platform.