 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFabian C Weigend
iRoCo: Intuitive Robot Control From Anywhere Using a Smartwatch
Mar 11, 2024
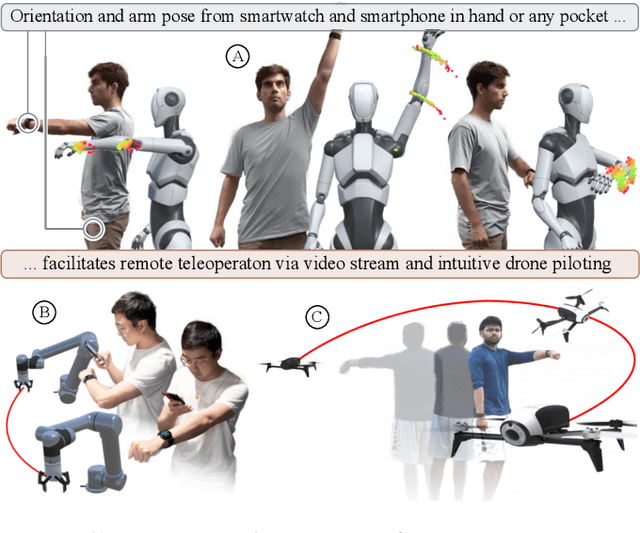
This paper introduces iRoCo (intuitive Robot Control) - a framework for ubiquitous human-robot collaboration using a single smartwatch and smartphone. By integrating probabilistic differentiable filters, iRoCo optimizes a combination of precise robot control and unrestricted user movement from ubiquitous devices. We demonstrate and evaluate the effectiveness of iRoCo in practical teleoperation and drone piloting applications. Comparative analysis shows no significant difference between task performance with iRoCo and gold-standard control systems in teleoperation tasks. Additionally, iRoCo users complete drone piloting tasks 32\% faster than with a traditional remote control and report less frustration in a subjective load index questionnaire. Our findings strongly suggest that iRoCo is a promising new approach for intuitive robot control through smartwatches and smartphones from anywhere, at any time. The code is available at www.github.com/wearable-motion-capture
Probabilistic Differentiable Filters Enable Ubiquitous Robot Control with Smartwatches
Sep 12, 2023



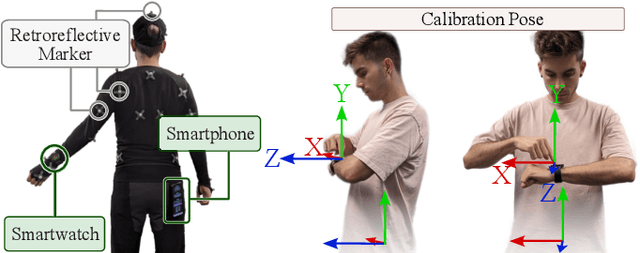
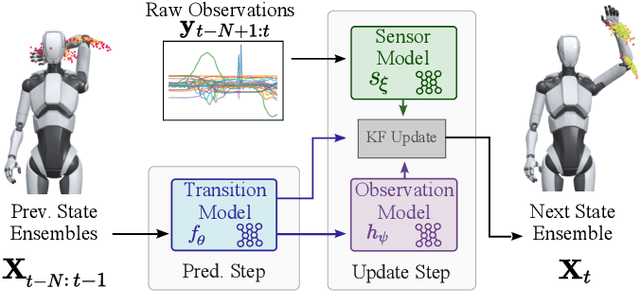
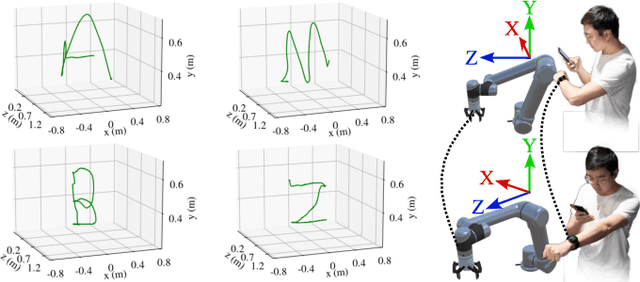
Ubiquitous robot control and human-robot collaboration using smart devices poses a challenging problem primarily due to strict accuracy requirements and sparse information. This paper presents a novel approach that incorporates a probabilistic differentiable filter, specifically the Differentiable Ensemble Kalman Filter (DEnKF), to facilitate robot control solely using Inertial Measurement Units (IMUs) observations from a smartwatch and a smartphone. The implemented system achieves accurate estimation of human pose state with a reduction of 30.2% compared to the baseline using the Mean Per Joint Vertex Error (MPJVE). Our results foster smartwatches and smartphones as a cost-effective alternative human-pose state estimation. Furthermore, experiment results from human-robot handover tasks underscore that smart devices allow for low-cost, versatile and ubiquitous robot control.
Anytime, Anywhere: Human Arm Pose from Smartwatch Data for Ubiquitous Robot Control and Teleoperation
Jun 22, 2023



This work devises an optimized machine learning approach for human arm pose estimation from a single smartwatch. Our approach results in a distribution of possible wrist and elbow positions, which allows for a measure of uncertainty and the detection of multiple possible arm posture solutions, i.e., multimodal pose distributions. Combining estimated arm postures with speech recognition, we turn the smartwatch into a ubiquitous, low-cost and versatile robot control interface. We demonstrate in two use-cases that this intuitive control interface enables users to swiftly intervene in robot behavior, to temporarily adjust their goal, or to train completely new control policies by imitation. Extensive experiments show that the approach results in a 40% reduction in prediction error over the current state-of-the-art and achieves a mean error of 2.56cm for wrist and elbow positions.