 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFiras Abi-Farraj
Collision detection and identification for a legged manipulator
Jul 29, 2022
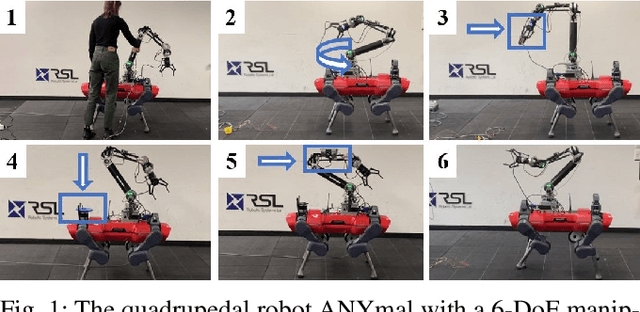

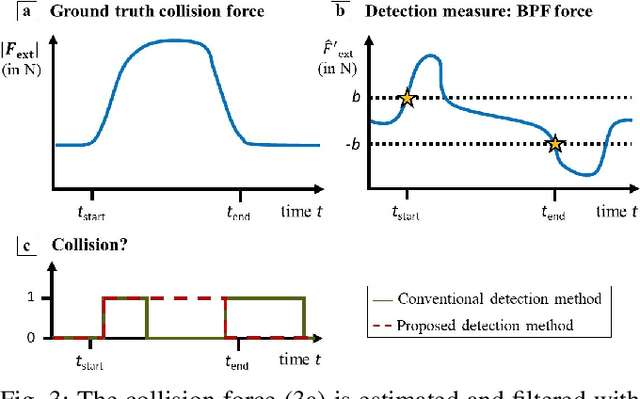

To safely deploy legged robots in the real world it is necessary to provide them with the ability to reliably detect unexpected contacts and accurately estimate the corresponding contact force. In this paper, we propose a collision detection and identification pipeline for a quadrupedal manipulator. We first introduce an approach to estimate the collision time span based on band-pass filtering and show that this information is key for obtaining accurate collision force estimates. We then improve the accuracy of the identified force magnitude by compensating for model inaccuracies, unmodeled loads, and any other potential source of quasi-static disturbances acting on the robot. We validate our framework with extensive hardware experiments in various scenarios, including trotting and additional unmodeled load on the robot.
Haptic Teleoperation of High-dimensional Robotic Systems Using a Feedback MPC Framework
Jul 29, 2022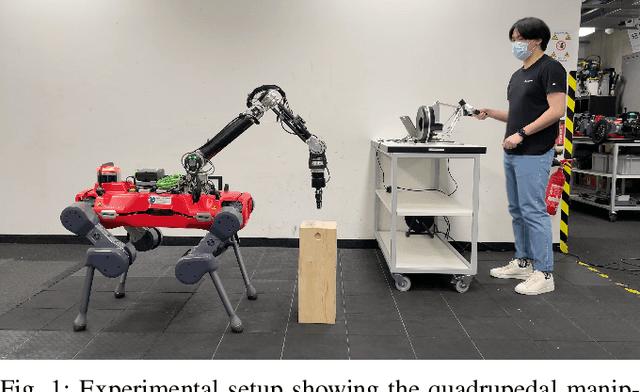
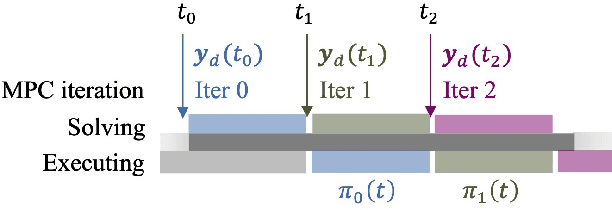
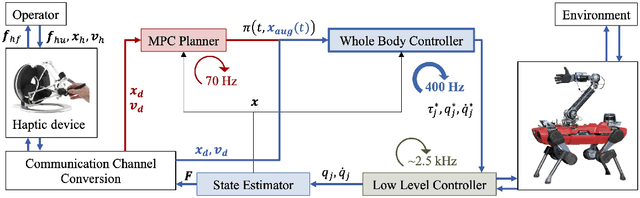
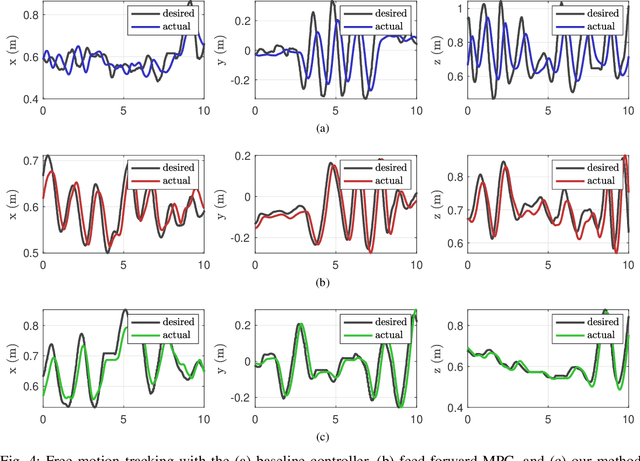
Model Predictive Control (MPC) schemes have proven their efficiency in controlling high degree-of-freedom (DoF) complex robotic systems. However, they come at a high computational cost and an update rate of about tens of hertz. This relatively slow update rate hinders the possibility of stable haptic teleoperation of such systems since the slow feedback loops can cause instabilities and loss of transparency to the operator. This work presents a novel framework for transparent teleoperation of MPC-controlled complex robotic systems. In particular, we employ a feedback MPC approach and exploit its structure to account for the operator input at a fast rate which is independent of the update rate of the MPC loop itself. We demonstrate our framework on a mobile manipulator platform and show that it significantly improves haptic teleoperation's transparency and stability. We also highlight that the proposed feedback structure is constraint satisfactory and does not violate any constraints defined in the optimal control problem. To the best of our knowledge, this work is the first realization of the bilateral teleoperation of a legged manipulator using a whole-body MPC framework.
Human-in-the-loop optimisation: mixed initiative grasping for optimally facilitating post-grasp manipulative actions
Jul 25, 2017



This paper addresses the problem of mixed initiative, shared control for master-slave grasping and manipulation. We propose a novel system, in which an autonomous agent assists a human in teleoperating a remote slave arm/gripper, using a haptic master device. Our system is designed to exploit the human operator's expertise in selecting stable grasps (still an open research topic in autonomous robotics). Meanwhile, a-priori knowledge of: i) the slave robot kinematics, and ii) the desired post-grasp manipulative trajectory, are fed to an autonomous agent which transmits force cues to the human, to encourage maximally manipulable grasp pose selections. Specifically, the autonomous agent provides force cues to the human, during the reach-to-grasp phase, which encourage the human to select grasp poses which maximise manipulation capability during the post-grasp object manipulation phase. We introduce a task-relevant velocity manipulability cost function (TOV), which is used to identify the maximum kinematic capability of a manipulator during post-grasp motions, and feed this back as force cues to the human during the pre-grasp phase. We show that grasps which minimise TOV result in significantly reduced control effort of the manipulator, compared to other feasible grasps. We demonstrate the effectiveness of our approach by experiments with both real and simulated robots.