 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Analysis of Visual Odometry in Virtual and Real-World Railways Environments
Mar 25, 2024Perception tasks play a crucial role in the development of automated operations and systems across multiple application fields. In the railway transportation domain, these tasks can improve the safety, reliability, and efficiency of various perations, including train localization, signal recognition, and track discrimination. However, collecting considerable and precisely labeled datasets for testing such novel algorithms poses extreme challenges in the railway environment due to the severe restrictions in accessing the infrastructures and the practical difficulties associated with properly equipping trains with the required sensors, such as cameras and LiDARs. The remarkable innovations of graphic engine tools offer new solutions to craft realistic synthetic datasets. To illustrate the advantages of employing graphic simulation for early-stage testing of perception tasks in the railway domain, this paper presents a comparative analysis of the performance of a SLAM algorithm applied both in a virtual synthetic environment and a real-world scenario. The analysis leverages virtual railway environments created with the latest version of Unreal Engine, facilitating data collection and allowing the examination of challenging scenarios, including low-visibility, dangerous operational modes, and complex environments. The results highlight the feasibility and potentiality of graphic simulation to advance perception tasks in the railway domain.
1-Lipschitz Layers Compared: Memory, Speed, and Certifiable Robustness
Nov 28, 2023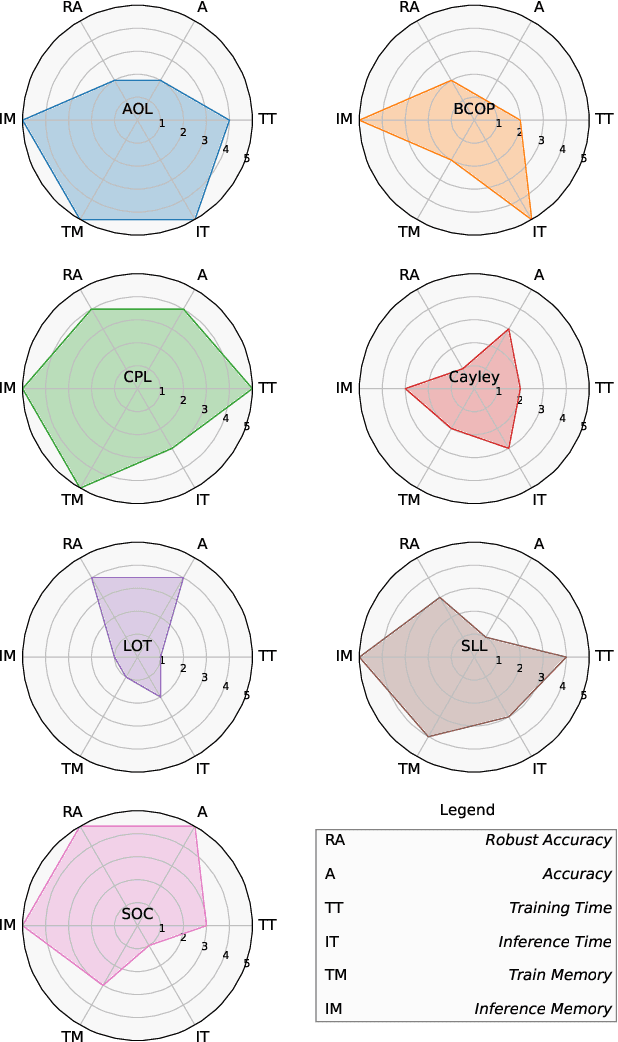

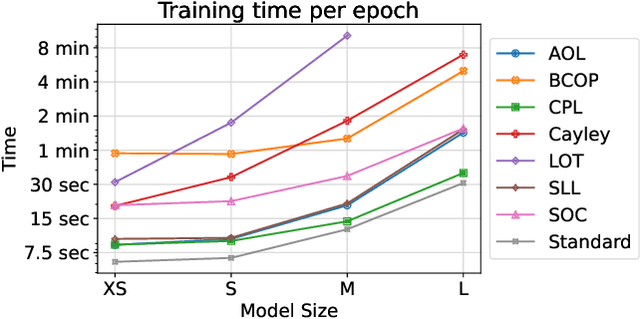
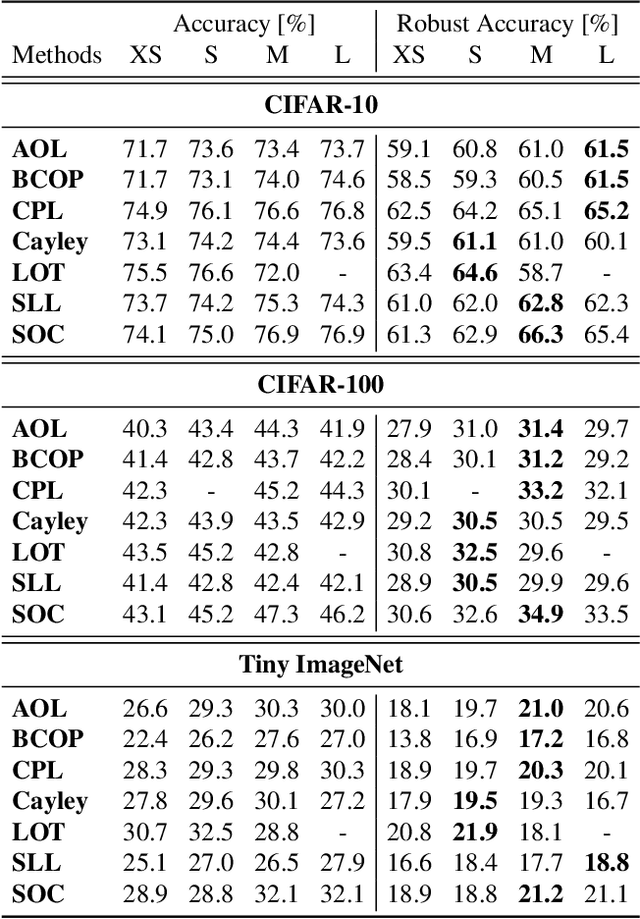
The robustness of neural networks against input perturbations with bounded magnitude represents a serious concern in the deployment of deep learning models in safety-critical systems. Recently, the scientific community has focused on enhancing certifiable robustness guarantees by crafting 1-Lipschitz neural networks that leverage Lipschitz bounded dense and convolutional layers. Although different methods have been proposed in the literature to achieve this goal, understanding the performance of such methods is not straightforward, since different metrics can be relevant (e.g., training time, memory usage, accuracy, certifiable robustness) for different applications. For this reason, this work provides a thorough theoretical and empirical comparison between methods by evaluating them in terms of memory usage, speed, and certifiable robust accuracy. The paper also provides some guidelines and recommendations to support the user in selecting the methods that work best depending on the available resources. We provide code at https://github.com/berndprach/1LipschitzLayersCompared.
Attention-Based Real-Time Defenses for Physical Adversarial Attacks in Vision Applications
Nov 19, 2023Deep neural networks exhibit excellent performance in computer vision tasks, but their vulnerability to real-world adversarial attacks, achieved through physical objects that can corrupt their predictions, raises serious security concerns for their application in safety-critical domains. Existing defense methods focus on single-frame analysis and are characterized by high computational costs that limit their applicability in multi-frame scenarios, where real-time decisions are crucial. To address this problem, this paper proposes an efficient attention-based defense mechanism that exploits adversarial channel-attention to quickly identify and track malicious objects in shallow network layers and mask their adversarial effects in a multi-frame setting. This work advances the state of the art by enhancing existing over-activation techniques for real-world adversarial attacks to make them usable in real-time applications. It also introduces an efficient multi-frame defense framework, validating its efficacy through extensive experiments aimed at evaluating both defense performance and computational cost.
TrainSim: A Railway Simulation Framework for LiDAR and Camera Dataset Generation
Feb 28, 2023



The railway industry is searching for new ways to automate a number of complex train functions, such as object detection, track discrimination, and accurate train positioning, which require the artificial perception of the railway environment through different types of sensors, including cameras, LiDARs, wheel encoders, and inertial measurement units. A promising approach for processing such sensory data is the use of deep learning models, which proved to achieve excellent performance in other application domains, as robotics and self-driving cars. However, testing new algorithms and solutions requires the availability of a large amount of labeled data, acquired in different scenarios and operating conditions, which are difficult to obtain in a real railway setting due to strict regulations and practical constraints in accessing the trackside infrastructure and equipping a train with the required sensors. To address such difficulties, this paper presents a visual simulation framework able to generate realistic railway scenarios in a virtual environment and automatically produce inertial data and labeled datasets from emulated LiDARs and cameras useful for training deep neural networks or testing innovative algorithms. A set of experimental results are reported to show the effectiveness of the proposed approach.
Robust-by-Design Classification via Unitary-Gradient Neural Networks
Sep 09, 2022



The use of neural networks in safety-critical systems requires safe and robust models, due to the existence of adversarial attacks. Knowing the minimal adversarial perturbation of any input x, or, equivalently, knowing the distance of x from the classification boundary, allows evaluating the classification robustness, providing certifiable predictions. Unfortunately, state-of-the-art techniques for computing such a distance are computationally expensive and hence not suited for online applications. This work proposes a novel family of classifiers, namely Signed Distance Classifiers (SDCs), that, from a theoretical perspective, directly output the exact distance of x from the classification boundary, rather than a probability score (e.g., SoftMax). SDCs represent a family of robust-by-design classifiers. To practically address the theoretical requirements of a SDC, a novel network architecture named Unitary-Gradient Neural Network is presented. Experimental results show that the proposed architecture approximates a signed distance classifier, hence allowing an online certifiable classification of x at the cost of a single inference.
CARLA-GeAR: a Dataset Generator for a Systematic Evaluation of Adversarial Robustness of Vision Models
Jun 09, 2022



Adversarial examples represent a serious threat for deep neural networks in several application domains and a huge amount of work has been produced to investigate them and mitigate their effects. Nevertheless, no much work has been devoted to the generation of datasets specifically designed to evaluate the adversarial robustness of neural models. This paper presents CARLA-GeAR, a tool for the automatic generation of photo-realistic synthetic datasets that can be used for a systematic evaluation of the adversarial robustness of neural models against physical adversarial patches, as well as for comparing the performance of different adversarial defense/detection methods. The tool is built on the CARLA simulator, using its Python API, and allows the generation of datasets for several vision tasks in the context of autonomous driving. The adversarial patches included in the generated datasets are attached to billboards or the back of a truck and are crafted by using state-of-the-art white-box attack strategies to maximize the prediction error of the model under test. Finally, the paper presents an experimental study to evaluate the performance of some defense methods against such attacks, showing how the datasets generated with CARLA-GeAR might be used in future work as a benchmark for adversarial defense in the real world. All the code and datasets used in this paper are available at http://carlagear.retis.santannapisa.it.
Defending From Physically-Realizable Adversarial Attacks Through Internal Over-Activation Analysis
Mar 14, 2022



This work presents Z-Mask, a robust and effective strategy to improve the adversarial robustness of convolutional networks against physically-realizable adversarial attacks. The presented defense relies on specific Z-score analysis performed on the internal network features to detect and mask the pixels corresponding to adversarial objects in the input image. To this end, spatially contiguous activations are examined in shallow and deep layers to suggest potential adversarial regions. Such proposals are then aggregated through a multi-thresholding mechanism. The effectiveness of Z-Mask is evaluated with an extensive set of experiments carried out on models for both semantic segmentation and object detection. The evaluation is performed with both digital patches added to the input images and printed patches positioned in the real world. The obtained results confirm that Z-Mask outperforms the state-of-the-art methods in terms of both detection accuracy and overall performance of the networks under attack. Additional experiments showed that Z-Mask is also robust against possible defense-aware attacks.
On the Real-World Adversarial Robustness of Real-Time Semantic Segmentation Models for Autonomous Driving
Jan 05, 2022



The existence of real-world adversarial examples (commonly in the form of patches) poses a serious threat for the use of deep learning models in safety-critical computer vision tasks such as visual perception in autonomous driving. This paper presents an extensive evaluation of the robustness of semantic segmentation models when attacked with different types of adversarial patches, including digital, simulated, and physical ones. A novel loss function is proposed to improve the capabilities of attackers in inducing a misclassification of pixels. Also, a novel attack strategy is presented to improve the Expectation Over Transformation method for placing a patch in the scene. Finally, a state-of-the-art method for detecting adversarial patch is first extended to cope with semantic segmentation models, then improved to obtain real-time performance, and eventually evaluated in real-world scenarios. Experimental results reveal that, even though the adversarial effect is visible with both digital and real-world attacks, its impact is often spatially confined to areas of the image around the patch. This opens to further questions about the spatial robustness of real-time semantic segmentation models.
On the Minimal Adversarial Perturbation for Deep Neural Networks with Provable Estimation Error
Jan 04, 2022



Although Deep Neural Networks (DNNs) have shown incredible performance in perceptive and control tasks, several trustworthy issues are still open. One of the most discussed topics is the existence of adversarial perturbations, which has opened an interesting research line on provable techniques capable of quantifying the robustness of a given input. In this regard, the Euclidean distance of the input from the classification boundary denotes a well-proved robustness assessment as the minimal affordable adversarial perturbation. Unfortunately, computing such a distance is highly complex due the non-convex nature of NNs. Despite several methods have been proposed to address this issue, to the best of our knowledge, no provable results have been presented to estimate and bound the error committed. This paper addresses this issue by proposing two lightweight strategies to find the minimal adversarial perturbation. Differently from the state-of-the-art, the proposed approach allows formulating an error estimation theory of the approximate distance with respect to the theoretical one. Finally, a substantial set of experiments is reported to evaluate the performance of the algorithms and support the theoretical findings. The obtained results show that the proposed strategies approximate the theoretical distance for samples close to the classification boundary, leading to provable robustness guarantees against any adversarial attacks.
Evaluating the Robustness of Semantic Segmentation for Autonomous Driving against Real-World Adversarial Patch Attacks
Aug 13, 2021



Deep learning and convolutional neural networks allow achieving impressive performance in computer vision tasks, such as object detection and semantic segmentation (SS). However, recent studies have shown evident weaknesses of such models against adversarial perturbations. In a real-world scenario instead, like autonomous driving, more attention should be devoted to real-world adversarial examples (RWAEs), which are physical objects (e.g., billboards and printable patches) optimized to be adversarial to the entire perception pipeline. This paper presents an in-depth evaluation of the robustness of popular SS models by testing the effects of both digital and real-world adversarial patches. These patches are crafted with powerful attacks enriched with a novel loss function. Firstly, an investigation on the Cityscapes dataset is conducted by extending the Expectation Over Transformation (EOT) paradigm to cope with SS. Then, a novel attack optimization, called scene-specific attack, is proposed. Such an attack leverages the CARLA driving simulator to improve the transferability of the proposed EOT-based attack to a real 3D environment. Finally, a printed physical billboard containing an adversarial patch was tested in an outdoor driving scenario to assess the feasibility of the studied attacks in the real world. Exhaustive experiments revealed that the proposed attack formulations outperform previous work to craft both digital and real-world adversarial patches for SS. At the same time, the experimental results showed how these attacks are notably less effective in the real world, hence questioning the practical relevance of adversarial attacks to SS models for autonomous/assisted driving.