 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGiovanni Cioffi
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024
Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables
HDVIO: Improving Localization and Disturbance Estimation with Hybrid Dynamics VIO
Jun 28, 2023



Visual-inertial odometry (VIO) is the most common approach for estimating the state of autonomous micro aerial vehicles using only onboard sensors. Existing methods improve VIO performance by including a dynamics model in the estimation pipeline. However, such methods degrade in the presence of low-fidelity vehicle models and continuous external disturbances, such as wind. Our proposed method, HDVIO, overcomes these limitations by using a hybrid dynamics model that combines a point-mass vehicle model with a learning-based component that captures complex aerodynamic effects. HDVIO estimates the external force and the full robot state by leveraging the discrepancy between the actual motion and the predicted motion of the hybrid dynamics model. Our hybrid dynamics model uses a history of thrust and IMU measurements to predict the vehicle dynamics. To demonstrate the performance of our method, we present results on both public and novel drone dynamics datasets and show real-world experiments of a quadrotor flying in strong winds up to 25 km/h. The results show that our approach improves the motion and external force estimation compared to the state-of-the-art by up to 33% and 40%, respectively. Furthermore, differently from existing methods, we show that it is possible to predict the vehicle dynamics accurately while having no explicit knowledge of its full state.
Autonomous Power Line Inspection with Drones via Perception-Aware MPC
Apr 03, 2023



Drones have the potential to revolutionize power line inspection by increasing productivity, reducing inspection time, improving data quality, and eliminating the risks for human operators. Current state-of-the-art systems for power line inspection have two shortcomings: (i) control is decoupled from perception and needs accurate information about the location of the power lines and masts; (ii) collision avoidance is decoupled from the power line tracking, which results in poor tracking in the vicinity of the power masts, and, consequently, in decreased data quality for visual inspection. In this work, we propose a model predictive controller (MPC) that overcomes these limitations by tightly coupling perception and action. Our controller generates commands that maximize the visibility of the power lines while, at the same time, safely avoiding the power masts. For power line detection, we propose a lightweight learning-based detector that is trained only on synthetic data and is able to transfer zero-shot to real-world power line images. We validate our system in simulation and real-world experiments on a mock-up power line infrastructure.
Autonomous Drone Racing: A Survey
Jan 05, 2023



Over the last decade, the use of autonomous drone systems for surveying, search and rescue, or last-mile delivery has increased exponentially. With the rise of these applications comes the need for highly robust, safety-critical algorithms which can operate drones in complex and uncertain environments. Additionally, flying fast enables drones to cover more ground which in turn increases productivity and further strengthens their use case. One proxy for developing algorithms used in high-speed navigation is the task of autonomous drone racing, where researchers program drones to fly through a sequence of gates and avoid obstacles as quickly as possible using onboard sensors and limited computational power. Speeds and accelerations exceed over 80 kph and 4 g respectively, raising significant challenges across perception, planning, control, and state estimation. To achieve maximum performance, systems require real-time algorithms that are robust to motion blur, high dynamic range, model uncertainties, aerodynamic disturbances, and often unpredictable opponents. This survey covers the progression of autonomous drone racing across model-based and learning-based approaches. We provide an overview of the field, its evolution over the years, and conclude with the biggest challenges and open questions to be faced in the future.
Learned Inertial Odometry for Autonomous Drone Racing
Oct 27, 2022



Inertial odometry is an attractive solution to the problem of state estimation for agile quadrotor flight. It is inexpensive, lightweight, and it is not affected by perceptual degradation. However, only relying on the integration of the inertial measurements for state estimation is infeasible. The errors and time-varying biases present in such measurements cause the accumulation of large drift in the pose estimates. Recently, inertial odometry has made significant progress in estimating the motion of pedestrians. State-of-the-art algorithms rely on learning a motion prior that is typical of humans but cannot be transferred to drones. In this work, we propose a learning-based odometry algorithm that uses an inertial measurement unit (IMU) as the only sensor modality for autonomous drone racing tasks. The core idea of our system is to couple a model-based filter, driven by the inertial measurements, with a learning-based module that has access to the control commands. We show that our inertial odometry algorithm is superior to the state-of-the-art filter-based and optimization-based visual- inertial odometry as well as the state-of-the-art learned-inertial odometry. Additionally, we show that our system is comparable to a visual-inertial odometry solution that uses a camera and exploits the known gate location and appearance. We believe that the application in autonomous drone racing paves the way for novel research in inertial odometry for agile quadrotor flight. We will release the code upon acceptance.
Continuous-Time vs. Discrete-Time Vision-based SLAM: A Comparative Study
Feb 17, 2022



Robotic practitioners generally approach the vision-based SLAM problem through discrete-time formulations. This has the advantage of a consolidated theory and very good understanding of success and failure cases. However, discrete-time SLAM needs tailored algorithms and simplifying assumptions when high-rate and/or asynchronous measurements, coming from different sensors, are present in the estimation process. Conversely, continuous-time SLAM, often overlooked by practitioners, does not suffer from these limitations. Indeed, it allows integrating new sensor data asynchronously without adding a new optimization variable for each new measurement. In this way, the integration of asynchronous or continuous high-rate streams of sensor data does not require tailored and highly-engineered algorithms, enabling the fusion of multiple sensor modalities in an intuitive fashion. On the down side, continuous time introduces a prior that could worsen the trajectory estimates in some unfavorable situations. In this work, we aim at systematically comparing the advantages and limitations of the two formulations in vision-based SLAM. To do so, we perform an extensive experimental analysis, varying robot type, speed of motion, and sensor modalities. Our experimental analysis suggests that, independently of the trajectory type, continuous-time SLAM is superior to its discrete counterpart whenever the sensors are not time-synchronized. In the context of this work, we developed, and open source, a modular and efficient software architecture containing state-of-the-art algorithms to solve the SLAM problem in discrete and continuous time.
* IEEE Robotics and Automation Letters (RA-L), 2022
The Hilti SLAM Challenge Dataset
Sep 23, 2021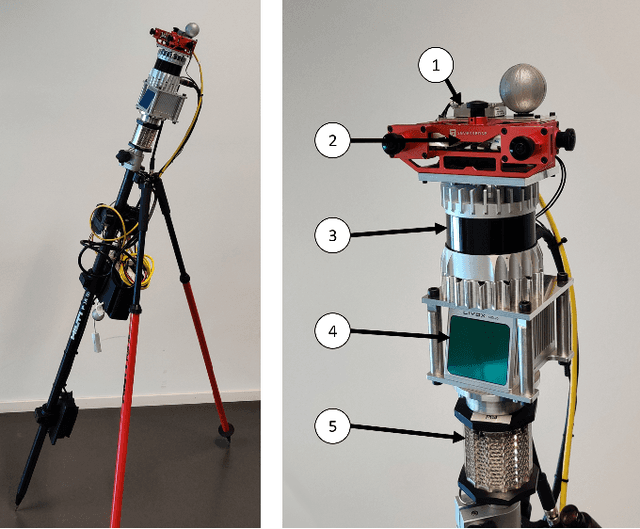
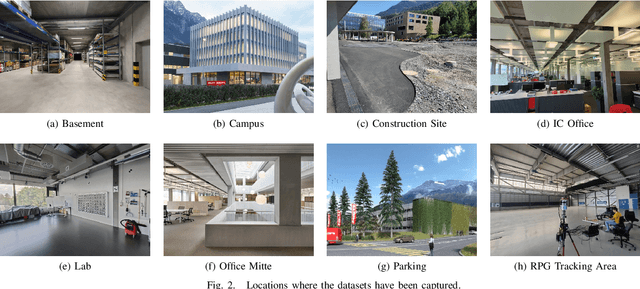
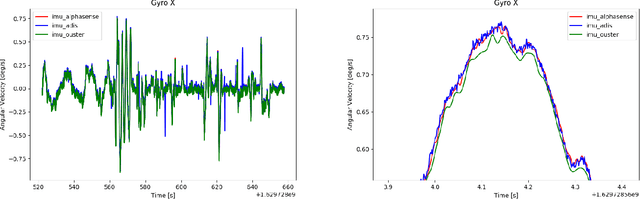
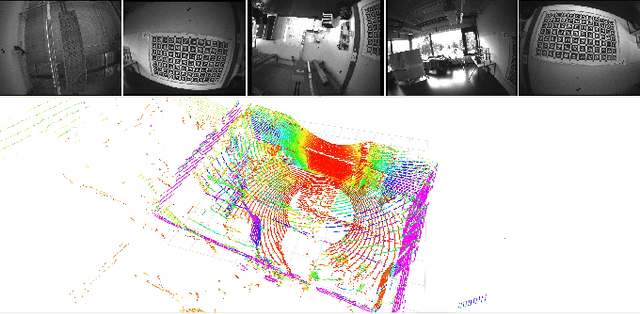
Accurate and robust pose estimation is a fundamental capability for autonomous systems to navigate, map and perform tasks. Particularly, construction environments pose challenging problem to Simultaneous Localization and Mapping (SLAM) algorithms due to sparsity, varying illumination conditions, and dynamic objects. Current academic research in SLAM is focused on developing more accurate and robust algorithms for example by fusing different sensor modalities. To help this research, we propose a new dataset, the Hilti SLAM Challenge Dataset. The sensor platform used to collect this dataset contains a number of visual, lidar and inertial sensors which have all been rigorously calibrated. All data is temporally aligned to support precise multi-sensor fusion. Each dataset includes accurate ground truth to allow direct testing of SLAM results. Raw data as well as intrinsic and extrinsic sensor calibration data from twelve datasets in various environments is provided. Each environment represents common scenarios found in building construction sites in various stages of completion.
Powerline Tracking with Event Cameras
Aug 01, 2021



Autonomous inspection of powerlines with quadrotors is challenging. Flights require persistent perception to keep a close look at the lines. We propose a method that uses event cameras to robustly track powerlines. Event cameras are inherently robust to motion blur, have low latency, and high dynamic range. Such properties are advantageous for autonomous inspection of powerlines with drones, where fast motions and challenging illumination conditions are ordinary. Our method identifies lines in the stream of events by detecting planes in the spatio-temporal signal, and tracks them through time. The implementation runs onboard and is capable of detecting multiple distinct lines in real time with rates of up to $320$ thousand events per second. The performance is evaluated in real-world flights along a powerline. The tracker is able to persistently track the powerlines, with a mean lifetime of the line $10\times$ longer than existing approaches.
Autonomous Quadrotor Flight despite Rotor Failure with Onboard Vision Sensors: Frames vs. Events
Feb 26, 2021



Fault-tolerant control is crucial for safety-critical systems, such as quadrotors. State-of-art flight controllers can stabilize and control a quadrotor even when subjected to the complete loss of a rotor. However, these methods rely on external sensors, such as GPS or motion capture systems, for state estimation. To the best of our knowledge, this has not yet been achieved with only onboard sensors. In this paper, we propose the first algorithm that combines fault-tolerant control and onboard vision-based state estimation to achieve position control of a quadrotor subjected to complete failure of one rotor. Experimental validations show that our approach is able to accurately control the position of a quadrotor during a motor failure scenario, without the aid of any external sensors. The primary challenge to vision-based state estimation stems from the inevitable high-speed yaw rotation (over 20 rad/s) of the damaged quadrotor, causing motion blur to cameras, which is detrimental to visual inertial odometry (VIO). We compare two types of visual inputs to the vision-based state estimation algorithm: standard frames and events. Experimental results show the advantage of using an event camera especially in low light environments due to its inherent high dynamic range and high temporal resolution. We believe that our approach will render autonomous quadrotors safer in both GPS denied or degraded environments. We release both our controller and VIO algorithm open source.
* 8 pages, 10 figures