 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaoru Xue
WROOM: An Autonomous Driving Approach for Off-Road Navigation
Apr 12, 2024
Off-road navigation is a challenging problem both at the planning level to get a smooth trajectory and at the control level to avoid flipping over, hitting obstacles, or getting stuck at a rough patch. There have been several recent works using classical approaches involving depth map prediction followed by smooth trajectory planning and using a controller to track it. We design an end-to-end reinforcement learning (RL) system for an autonomous vehicle in off-road environments using a custom-designed simulator in the Unity game engine. We warm-start the agent by imitating a rule-based controller and utilize Proximal Policy Optimization (PPO) to improve the policy based on a reward that incorporates Control Barrier Functions (CBF), facilitating the agent's ability to generalize effectively to real-world scenarios. The training involves agents concurrently undergoing domain-randomized trials in various environments. We also propose a novel simulation environment to replicate off-road driving scenarios and deploy our proposed approach on a real buggy RC car. Videos and additional results: https://sites.google.com/view/wroom-utd/home
Segment Anything Model for Road Network Graph Extraction
Mar 31, 2024We propose SAM-Road, an adaptation of the Segment Anything Model (SAM) for extracting large-scale, vectorized road network graphs from satellite imagery. To predict graph geometry, we formulate it as a dense semantic segmentation task, leveraging the inherent strengths of SAM. The image encoder of SAM is fine-tuned to produce probability masks for roads and intersections, from which the graph vertices are extracted via simple non-maximum suppression. To predict graph topology, we designed a lightweight transformer-based graph neural network, which leverages the SAM image embeddings to estimate the edge existence probabilities between vertices. Our approach directly predicts the graph vertices and edges for large regions without expensive and complex post-processing heuristics, and is capable of building complete road network graphs spanning multiple square kilometers in a matter of seconds. With its simple, straightforward, and minimalist design, SAM-Road achieves comparable accuracy with the state-of-the-art method RNGDet++, while being 40 times faster on the City-scale dataset. We thus demonstrate the power of a foundational vision model when applied to a graph learning task. The code is available at https://github.com/htcr/sam_road.
Learning Model Predictive Control with Error Dynamics Regression for Autonomous Racing
Sep 19, 2023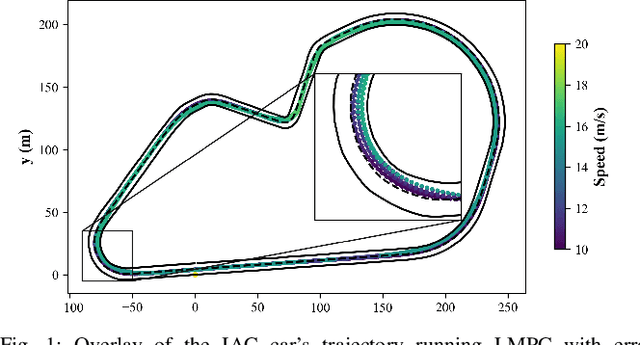
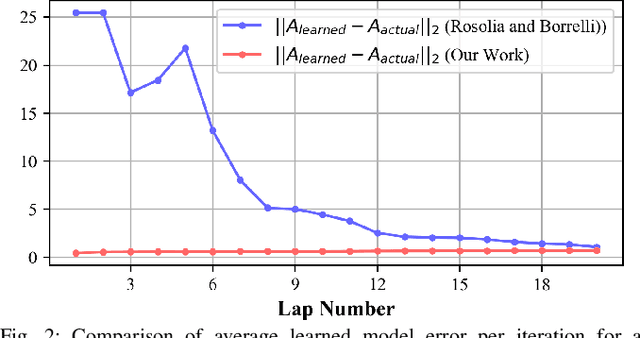
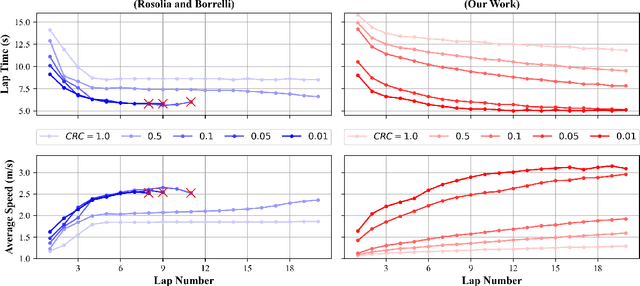
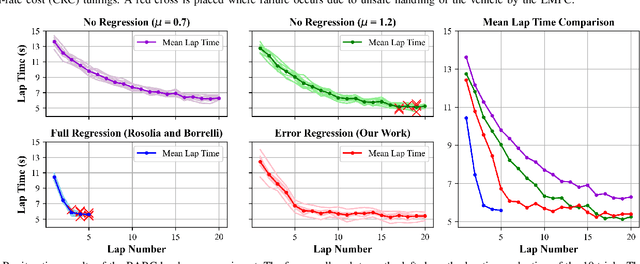
This work presents a novel Learning Model Predictive Control (LMPC) strategy for autonomous racing at the handling limit that can iteratively explore and learn unknown dynamics in high-speed operational domains. We start from existing LMPC formulations and modify the system dynamics learning method. In particular, our approach uses a nominal, global, nonlinear, physics-based model with a local, linear, data-driven learning of the error dynamics. We conduct experiments in simulation, 1/10th scale hardware, and deployed the proposed LMPC on a full-scale autonomous race car used in the Indy Autonomous Challenge (IAC) with closed loop experiments at the Putnam Park Road Course in Indiana, USA. The results show that the proposed control policy exhibits improved robustness to parameter tuning and data scarcity. Incremental and safety-aware exploration toward the limit of handling and iterative learning of the vehicle dynamics in high-speed domains is observed both in simulations and experiments.
Spline-Based Minimum-Curvature Trajectory Optimization for Autonomous Racing
Sep 17, 2023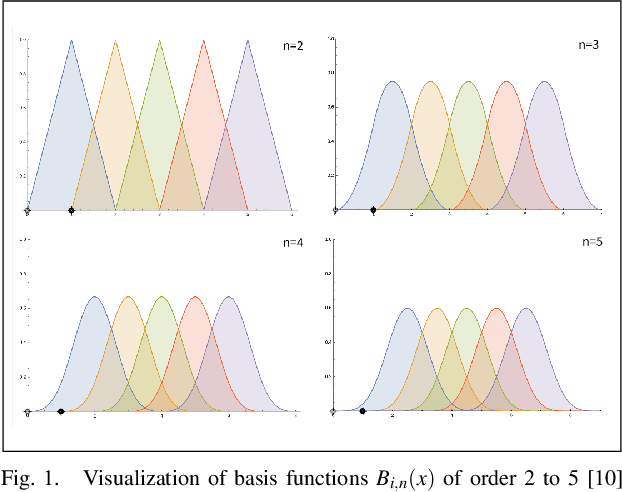
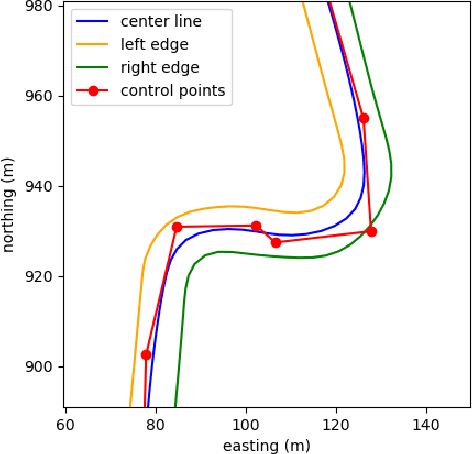
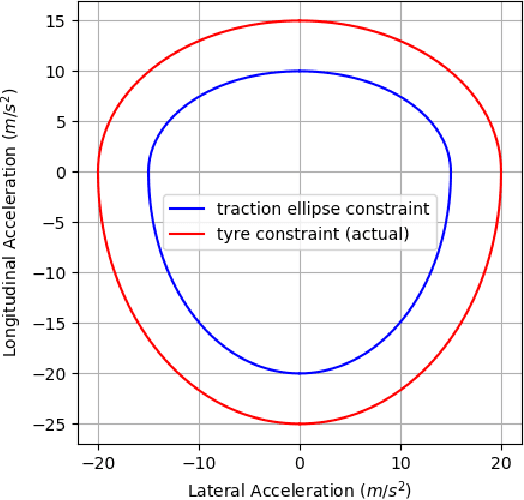
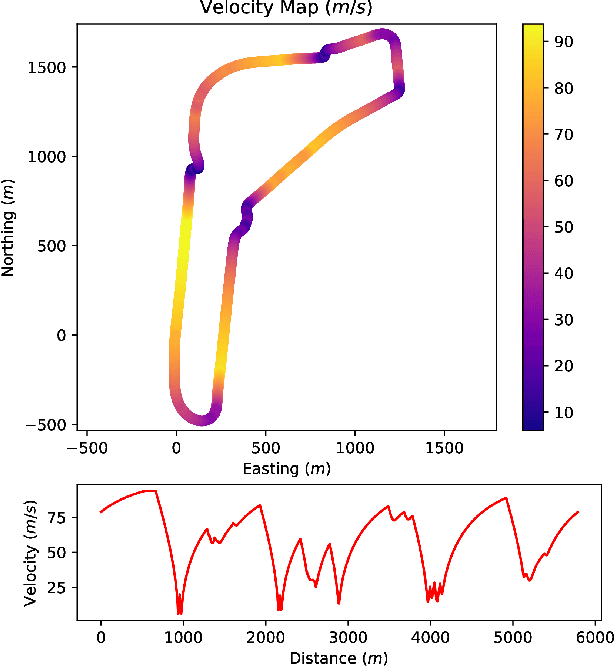
We propose a novel B-spline trajectory optimization method for autonomous racing. We consider the unavailability of sophisticated race car and race track dynamics in early-stage autonomous motorsports development and derive methods that work with limited dynamics data and additional conservative constraints. We formulate a minimum-curvature optimization problem with only the spline control points as optimization variables. We then compare the current state-of-the-art method with our optimization result, which achieves a similar level of optimality with a 90% reduction on the decision variable dimension, and in addition offers mathematical smoothness guarantee and flexible manipulation options. We concurrently reduce the problem computation time from seconds to milliseconds for a long race track, enabling future online adaptation of the previously offline technique.