 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHenry Williams
Deep Reinforcement Learning for Local Path Following of an Autonomous Formula SAE Vehicle
Jan 05, 2024
With the continued introduction of driverless events to Formula:Society of Automotive Engineers (F:SAE) competitions around the world, teams are investigating all aspects of the autonomous vehicle stack. This paper presents the use of Deep Reinforcement Learning (DRL) and Inverse Reinforcement Learning (IRL) to map locally-observed cone positions to a desired steering angle for race track following. Two state-of-the-art algorithms not previously tested in this context: soft actor critic (SAC) and adversarial inverse reinforcement learning (AIRL), are used to train models in a representative simulation. Three novel reward functions for use by RL algorithms in an autonomous racing context are also discussed. Tests performed in simulation and the real world suggest that both algorithms can successfully train models for local path following. Suggestions for future work are presented to allow these models to scale to a full F:SAE vehicle.
Racing Towards Reinforcement Learning based control of an Autonomous Formula SAE Car
Aug 24, 2023



With the rising popularity of autonomous navigation research, Formula Student (FS) events are introducing a Driverless Vehicle (DV) category to their event list. This paper presents the initial investigation into utilising Deep Reinforcement Learning (RL) for end-to-end control of an autonomous FS race car for these competitions. We train two state-of-the-art RL algorithms in simulation on tracks analogous to the full-scale design on a Turtlebot2 platform. The results demonstrate that our approach can successfully learn to race in simulation and then transfer to a real-world racetrack on the physical platform. Finally, we provide insights into the limitations of the presented approach and guidance into the future directions for applying RL toward full-scale autonomous FS racing.
Seeing the Fruit for the Leaves: Robotically Mapping Apple Fruitlets in a Commercial Orchard
Aug 15, 2023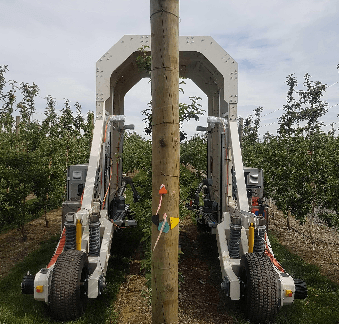
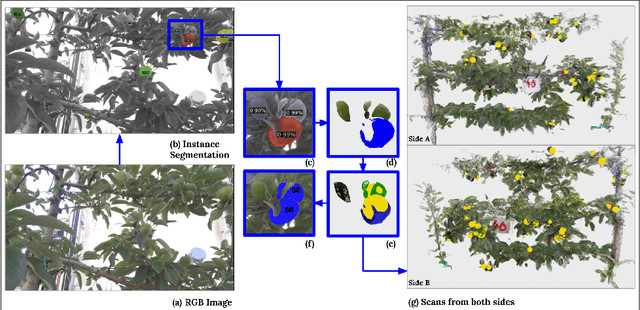

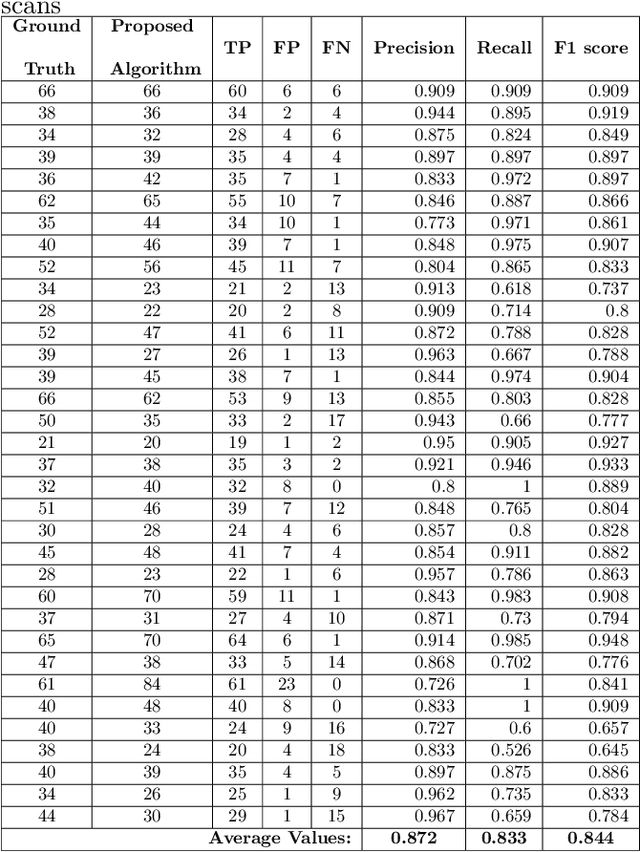
Aotearoa New Zealand has a strong and growing apple industry but struggles to access workers to complete skilled, seasonal tasks such as thinning. To ensure effective thinning and make informed decisions on a per-tree basis, it is crucial to accurately measure the crop load of individual apple trees. However, this task poses challenges due to the dense foliage that hides the fruitlets within the tree structure. In this paper, we introduce the vision system of an automated apple fruitlet thinning robot, developed to tackle the labor shortage issue. This paper presents the initial design, implementation,and evaluation specifics of the system. The platform straddles the 3.4 m tall 2D apple canopy structures to create an accurate map of the fruitlets on each tree. We show that this platform can measure the fruitlet load on an apple tree by scanning through both sides of the branch. The requirement of an overarching platform was justified since two-sided scans had a higher counting accuracy of 81.17 % than one-sided scans at 73.7 %. The system was also demonstrated to produce size estimates within 5.9% RMSE of their true size.
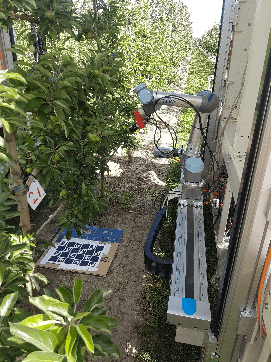
Visual based Tomato Size Measurement System for an Indoor Farming Environment
Apr 12, 2023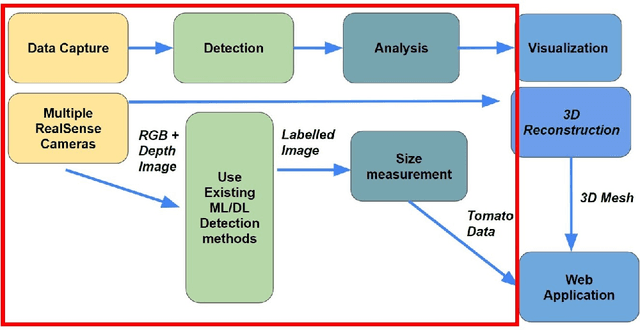
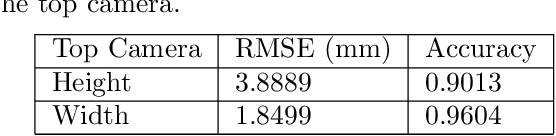
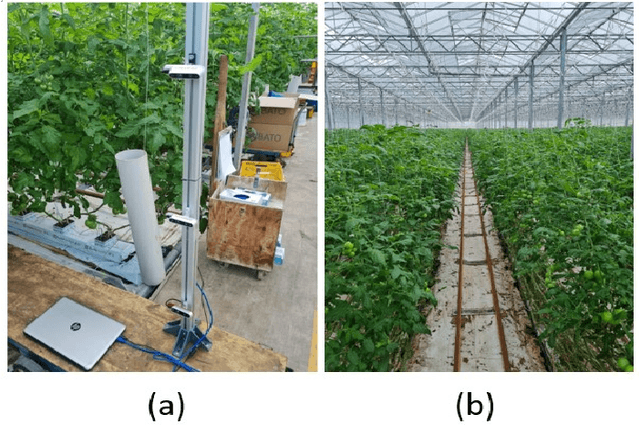
As technology progresses, smart automated systems will serve an increasingly important role in the agricultural industry. Current existing vision systems for yield estimation face difficulties in occlusion and scalability as they utilize a camera system that is large and expensive, which are unsuitable for orchard environments. To overcome these problems, this paper presents a size measurement method combining a machine learning model and depth images captured from three low cost RGBD cameras to detect and measure the height and width of tomatoes. The performance of the presented system is evaluated on a lab environment with real tomato fruits and fake leaves to simulate occlusion in the real farm environment. To improve accuracy by addressing fruit occlusion, our three-camera system was able to achieve a height measurement accuracy of 0.9114 and a width accuracy of 0.9443.
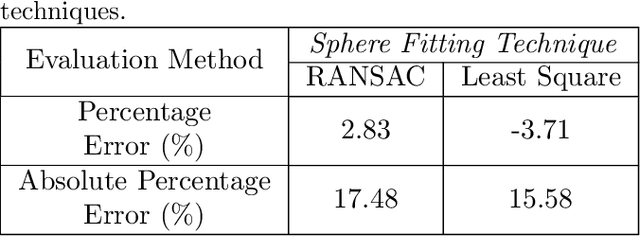
Look how they have grown: Non-destructive Leaf Detection and Size Estimation of Tomato Plants for 3D Growth Monitoring
Apr 07, 2023
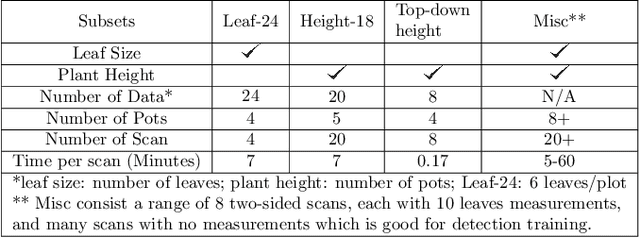
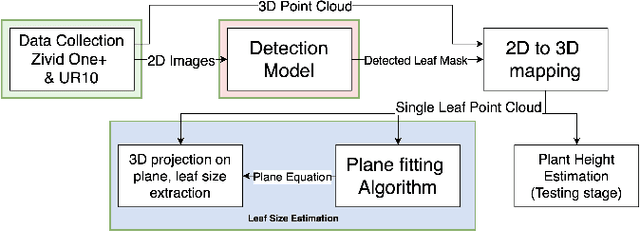
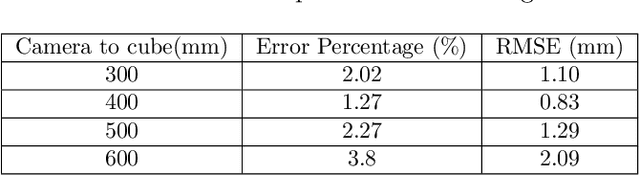
Smart farming is a growing field as technology advances. Plant characteristics are crucial indicators for monitoring plant growth. Research has been done to estimate characteristics like leaf area index, leaf disease, and plant height. However, few methods have been applied to non-destructive measurements of leaf size. In this paper, an automated non-destructive imaged-based measuring system is presented, which uses 2D and 3D data obtained using a Zivid 3D camera, creating 3D virtual representations (digital twins) of the tomato plants. Leaves are detected from corresponding 2D RGB images and mapped to their 3D point cloud using the detected leaf masks, which then pass the leaf point cloud to the plane fitting algorithm to extract the leaf size to provide data for growth monitoring. The performance of the measurement platform has been measured through a comprehensive trial on real-world tomato plants with quantified performance metrics compared to ground truth measurements. Three tomato leaf and height datasets (including 50+ 3D point cloud files of tomato plants) were collected and open-sourced in this project. The proposed leaf size estimation method demonstrates an RMSE value of 4.47mm and an R^2 value of 0.87. The overall measurement system (leaf detection and size estimation algorithms combine) delivers an RMSE value of 8.13mm and an R^2 value of 0.899.
* 10 Pages, 10 Figures
Seeing the Fruit for the Leaves: Towards Automated Apple Fruitlet Thinning
Feb 20, 2023
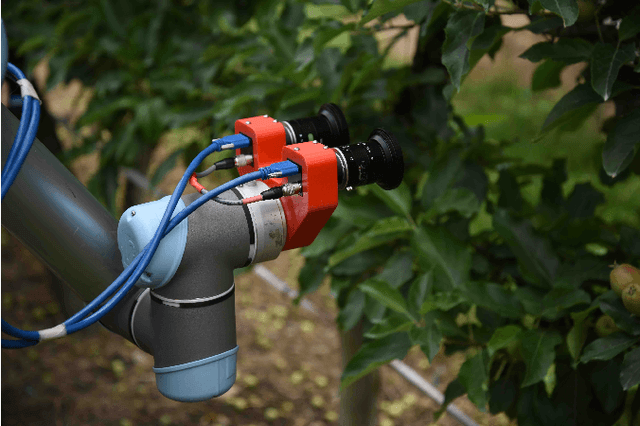
Following a global trend, the lack of reliable access to skilled labour is causing critical issues for the effective management of apple orchards. One of the primary challenges is maintaining skilled human operators capable of making precise fruitlet thinning decisions. Thinning requires accurately measuring the true crop load for individual apple trees to provide optimal thinning decisions on an individual basis. A challenging task due to the dense foliage obscuring the fruitlets within the tree structure. This paper presents the initial design, implementation, and evaluation details of the vision system for an automatic apple fruitlet thinning robot to meet this need. The platform consists of a UR5 robotic arm and stereo cameras which enable it to look around the leaves to map the precise number and size of the fruitlets on the apple branches. We show that this platform can measure the fruitlet load on the apple tree to with 84% accuracy in a real-world commercial apple orchard while being 87% precise.
Kiwifruit detection in challenging conditions
Jun 21, 2020
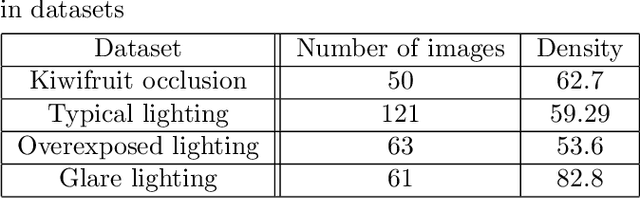
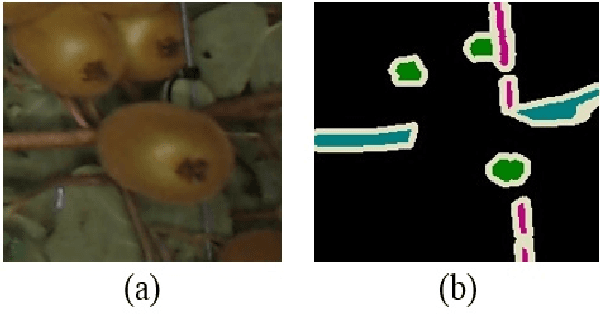
Accurate and reliable kiwifruit detection is one of the biggest challenges in developing a selective fruit harvesting robot. The vision system of an orchard robot faces difficulties such as dynamic lighting conditions and fruit occlusions. This paper presents a semantic segmentation approach with two novel image prepossessing techniques designed to detect kiwifruit under the harsh lighting conditions found in the canopy. The performance of the presented system is evaluated on a 3D real-world image set of kiwifruit under different lighting conditions (typical, glare, and overexposed). Alone the semantic segmentation approach achieves an F1_score of 0.82 on the typical lighting image set, but struggles with harsh lighting with an F1_score of 0.13. Utilising the prepossessing techniques the vision system under harsh lighting improves to an F1_score 0.42. To address the fruit occlusion challenge, the overall approach was found to be capable of detecting 87.0% of non-occluded and 30.0% of occluded kiwifruit across all lighting conditions.
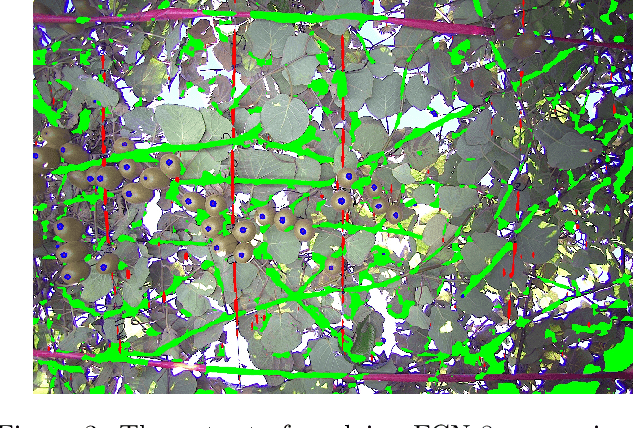
Deep Neural Network Based Real-time Kiwi Fruit Flower Detection in an Orchard Environment
Jun 08, 2020
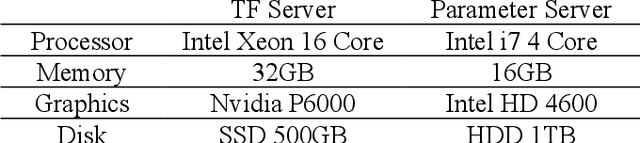
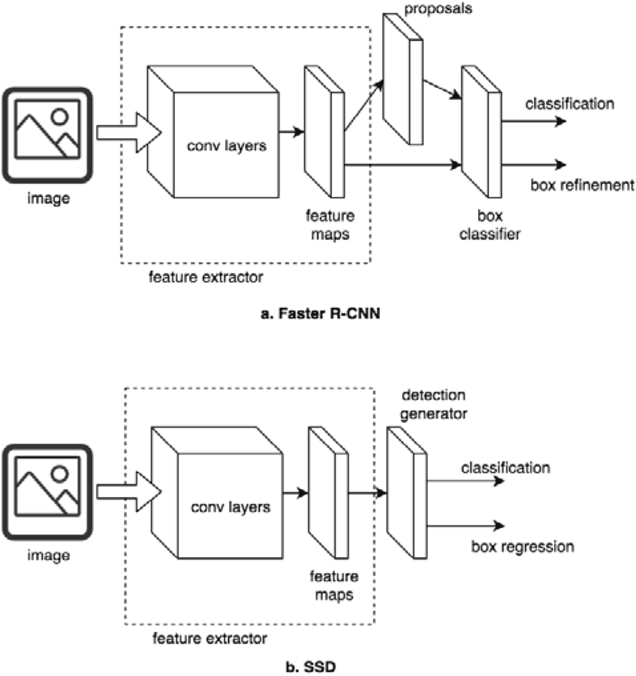
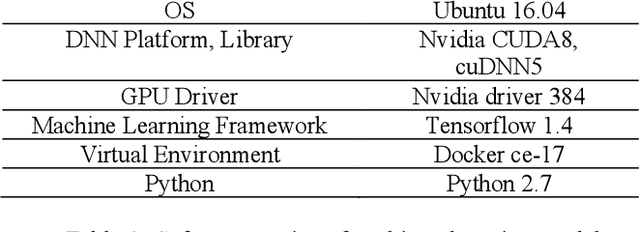
In this paper, we present a novel approach to kiwi fruit flower detection using Deep Neural Networks (DNNs) to build an accurate, fast, and robust autonomous pollination robot system. Recent work in deep neural networks has shown outstanding performance on object detection tasks in many areas. Inspired this, we aim for exploiting DNNs for kiwi fruit flower detection and present intensive experiments and their analysis on two state-of-the-art object detectors; Faster R-CNN and Single Shot Detector (SSD) Net, and feature extractors; Inception Net V2 and NAS Net with real-world orchard datasets. We also compare those approaches to find an optimal model which is suitable for a real-time agricultural pollination robot system in terms of accuracy and processing speed. We perform experiments with dataset collected from different seasons and locations (spatio-temporal consistency) in order to demonstrate the performance of the generalized model. The proposed system demonstrates promising results of 0.919, 0.874, and 0.889 for precision, recall, and F1-score respectively on our real-world dataset, and the performance satisfies the requirement for deploying the system onto an autonomous pollination robotics system.