 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeribert Schunkert
Real-time guidewire tracking and segmentation in intraoperative x-ray
Apr 12, 2024
During endovascular interventions, physicians have to perform accurate and immediate operations based on the available real-time information, such as the shape and position of guidewires observed on the fluoroscopic images, haptic information and the patients' physiological signals. For this purpose, real-time and accurate guidewire segmentation and tracking can enhance the visualization of guidewires and provide visual feedback for physicians during the intervention as well as for robot-assisted interventions. Nevertheless, this task often comes with the challenge of elongated deformable structures that present themselves with low contrast in the noisy fluoroscopic image sequences. To address these issues, a two-stage deep learning framework for real-time guidewire segmentation and tracking is proposed. In the first stage, a Yolov5s detector is trained, using the original X-ray images as well as synthetic ones, which is employed to output the bounding boxes of possible target guidewires. More importantly, a refinement module based on spatiotemporal constraints is incorporated to robustly localize the guidewire and remove false detections. In the second stage, a novel and efficient network is proposed to segment the guidewire in each detected bounding box. The network contains two major modules, namely a hessian-based enhancement embedding module and a dual self-attention module. Quantitative and qualitative evaluations on clinical intra-operative images demonstrate that the proposed approach significantly outperforms our baselines as well as the current state of the art and, in comparison, shows higher robustness to low quality images.
WarpEM: Dynamic Time Warping for Accurate Catheter Registration in EM-guided Procedures
Aug 07, 2023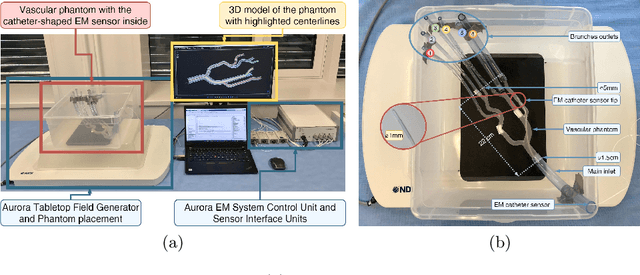
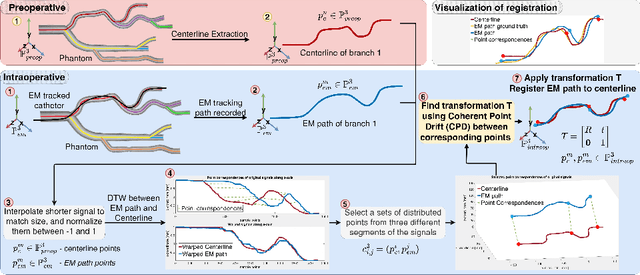
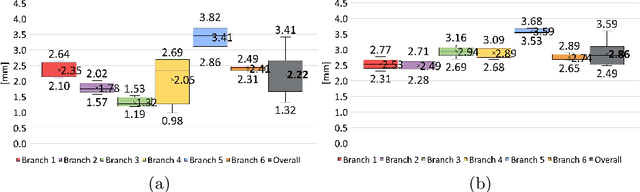
Accurate catheter tracking is crucial during minimally invasive endovascular procedures (MIEP), and electromagnetic (EM) tracking is a widely used technology that serves this purpose. However, registration between preoperative images and the EM tracking system is often challenging. Existing registration methods typically require manual interactions, which can be time-consuming, increase the risk of errors and change the procedural workflow. Although several registration methods are available for catheter tracking, such as marker-based and path-based approaches, their limitations can impact the accuracy of the resulting tracking solution, consequently, the outcome of the medical procedure. This paper introduces a novel automated catheter registration method for EM-guided MIEP. The method utilizes 3D signal temporal analysis, such as Dynamic Time Warping (DTW) algorithms, to improve registration accuracy and reliability compared to existing methods. DTW can accurately warp and match EM-tracked paths to the vessel's centerline, making it particularly suitable for registration. The introduced registration method is evaluated for accuracy in a vascular phantom using a marker-based registration as the ground truth. The results indicate that the DTW method yields accurate and reliable registration outcomes, with a mean error of $2.22$mm. The introduced registration method presents several advantages over state-of-the-art methods, such as high registration accuracy, no initialization required, and increased automation.