 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuawen Hu
Large Language Models for Robotics: Opportunities, Challenges, and Perspectives
Jan 09, 2024
Large language models (LLMs) have undergone significant expansion and have been increasingly integrated across various domains. Notably, in the realm of robot task planning, LLMs harness their advanced reasoning and language comprehension capabilities to formulate precise and efficient action plans based on natural language instructions. However, for embodied tasks, where robots interact with complex environments, text-only LLMs often face challenges due to a lack of compatibility with robotic visual perception. This study provides a comprehensive overview of the emerging integration of LLMs and multimodal LLMs into various robotic tasks. Additionally, we propose a framework that utilizes multimodal GPT-4V to enhance embodied task planning through the combination of natural language instructions and robot visual perceptions. Our results, based on diverse datasets, indicate that GPT-4V effectively enhances robot performance in embodied tasks. This extensive survey and evaluation of LLMs and multimodal LLMs across a variety of robotic tasks enriches the understanding of LLM-centric embodied intelligence and provides forward-looking insights toward bridging the gap in Human-Robot-Environment interaction.
Prompt Engineering for Healthcare: Methodologies and Applications
Apr 28, 2023
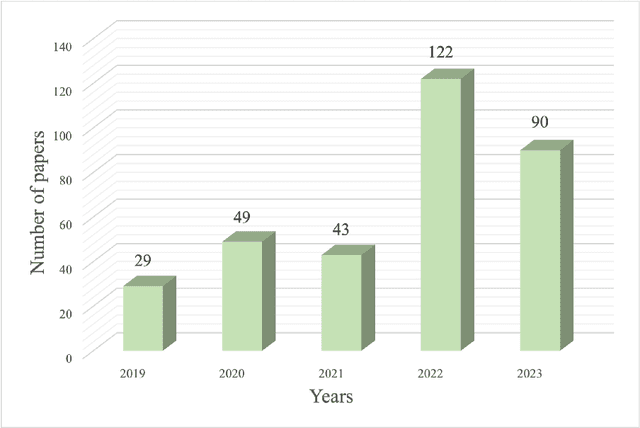
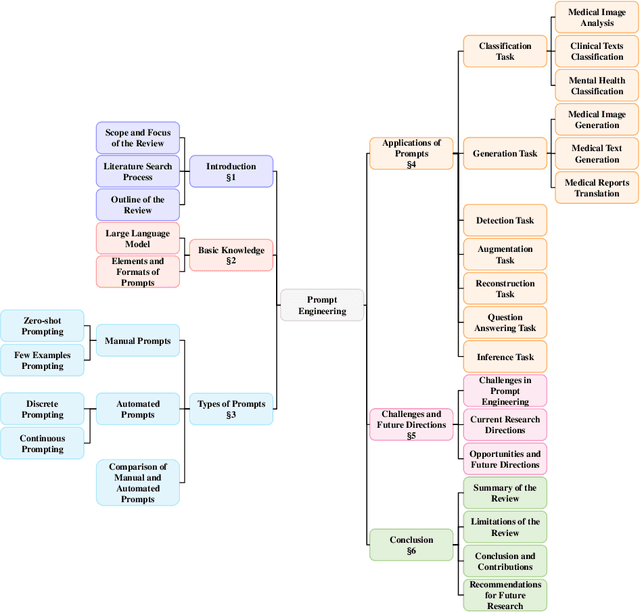
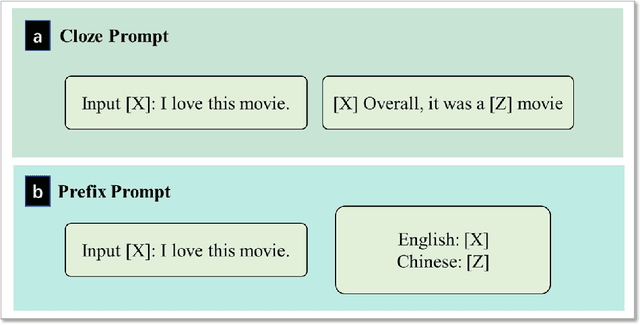
This review will introduce the latest advances in prompt engineering in the field of natural language processing (NLP) for the medical domain. First, we will provide a brief overview of the development of prompt engineering and emphasize its significant contributions to healthcare NLP applications such as question-answering systems, text summarization, and machine translation. With the continuous improvement of general large language models, the importance of prompt engineering in the healthcare domain is becoming increasingly prominent. The aim of this article is to provide useful resources and bridges for healthcare NLP researchers to better explore the application of prompt engineering in this field. We hope that this review can provide new ideas and inspire ample possibilities for research and application in medical NLP.