 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHugh L. Kennedy
Lecture notes on the design of low-pass digital filters with wireless-communication applications
Nov 14, 2022
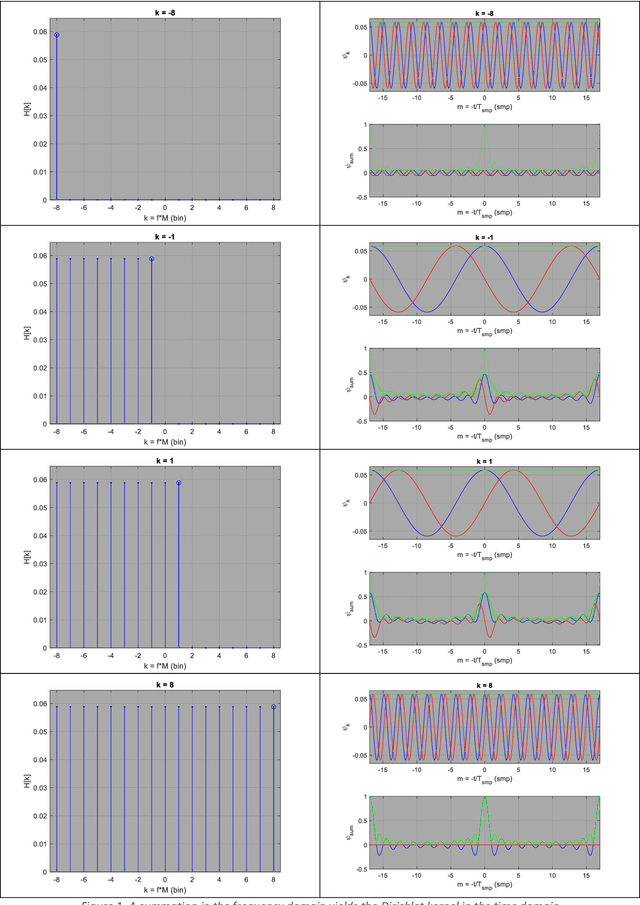
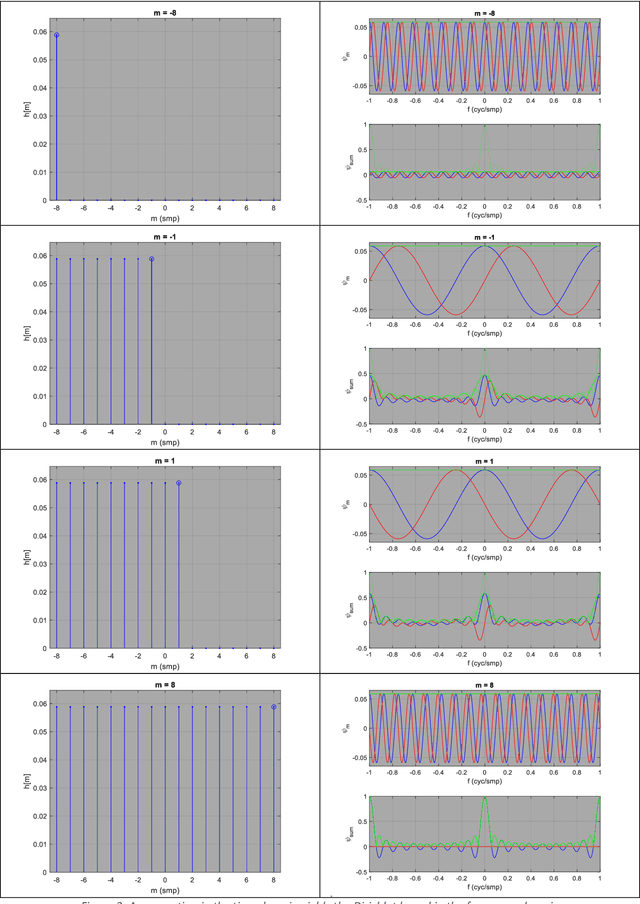
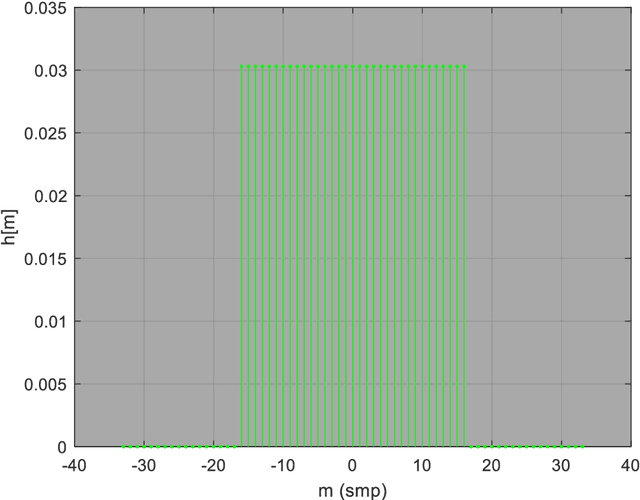
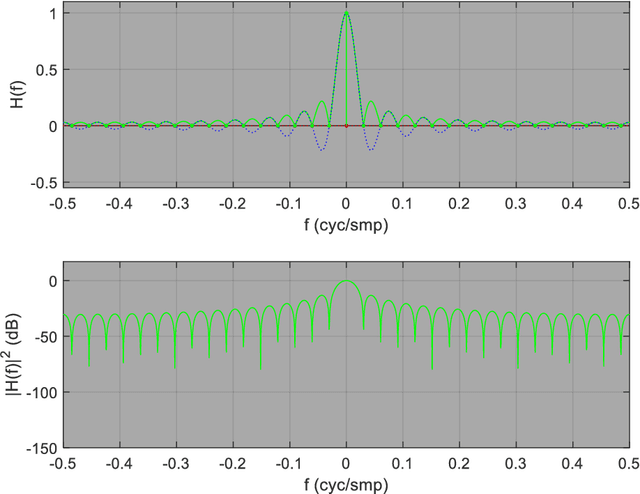
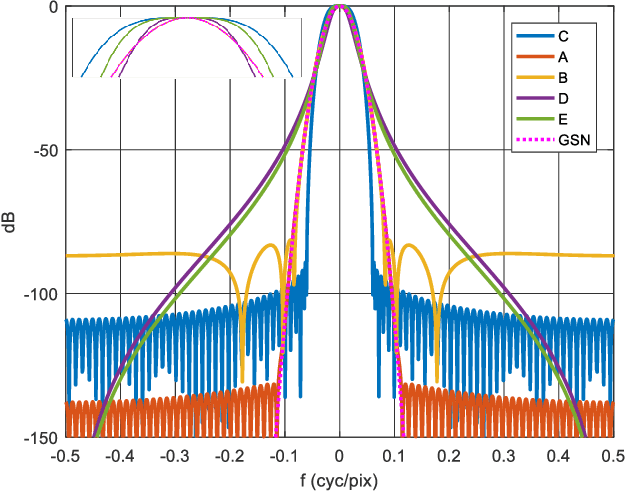
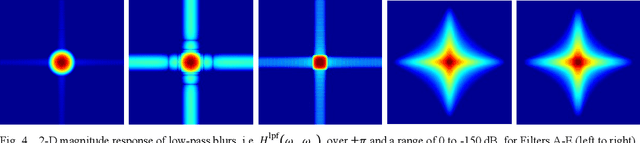
The low-pass filter is a fundamental building block from which digital signal-processing systems (e.g. radio and radar) are built. Signals in the electromagnetic spectrum extend over all timescales/frequencies and are used to transmit and receive very long or very short pulses of very narrow or very wide bandwidth. Time/Frequency agility is the key for optimal spectrum utilization (i.e. to suppress interference and enhance propagation) and low-pass filtering is the low-level digital mechanism for manoeuvre in this domain. By increasing and decreasing the bandwidth of a low-pass filter, thus decreasing and increasing its pulse duration, the engineer may shift energy concentration between frequency and time. Simple processes for engineering such components are described and explained below. These lecture notes are part of a short course that is intended to help recent engineering graduates design low-pass digital filters for this purpose, who have had some exposure to the topic during their studies, and who are now interested in the sending and receiving signals over the electromagnetic spectrum, in wireless communication (i.e. radio) and remote sensing (e.g. radar) applications, for instance. The best way to understand the material is to interact with the spectrum using receivers and or transmitters and software-defined radio development-kits provide a convenient platform for experimentation. Fortunately, wireless communication in the radio-frequency spectrum is an ideal application for the illustration of waveform agility in the electromagnetic spectrum. In Parts I and II, the theoretical foundations of digital low-pass filters are presented, i.e. signals-and-systems theory, then in Part III they are applied to the problem of radio communication and used to concentrate energy in time or frequency.
Noise will be noise: Or phase optimized recursive filters for interference suppression, signal differentiation and state estimation (extended version)
Jun 01, 2021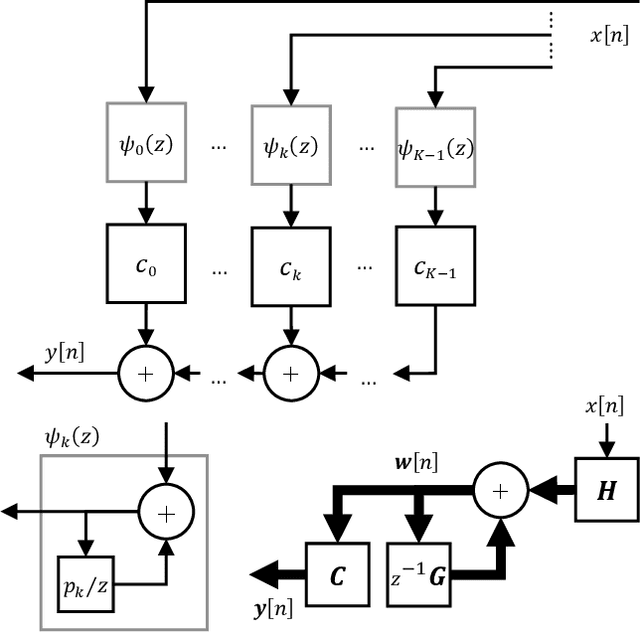
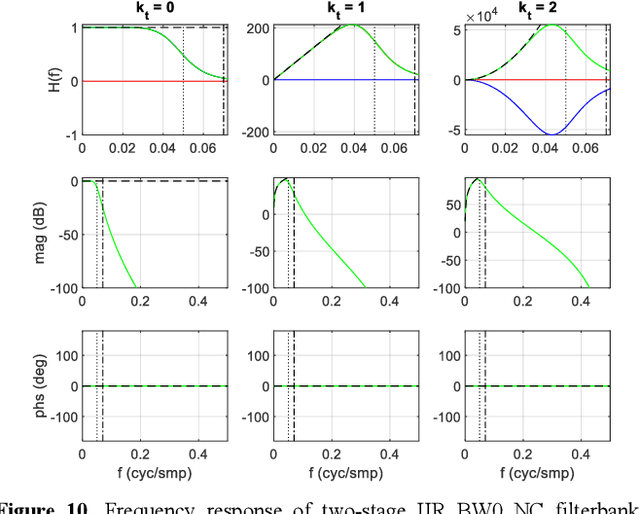
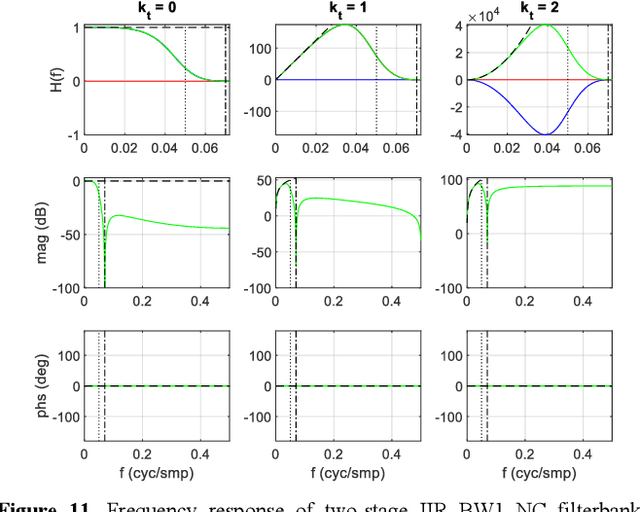
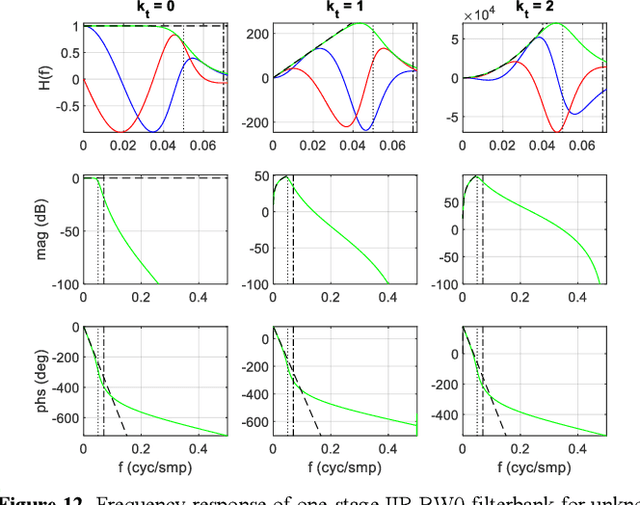
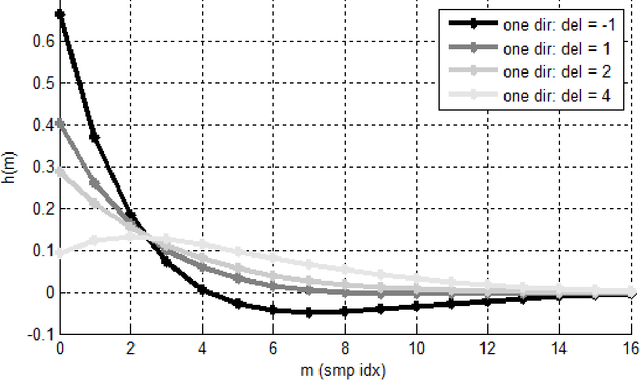
The increased temporal and spectral resolution of oversampled systems allows many sensor-signal analysis tasks to be performed (e.g. detection, classification and tracking) using a filterbank of low-pass digital differentiators. Such filters are readily designed via flatness constraints on the derivatives of the complex frequency response at dc, pi and at the centre frequencies of narrowband interferers, i.e. using maximally-flat (MaxFlat) designs. Infinite-impulse-response (IIR) filters are ideal in embedded online systems with high data-rates because computational complexity is independent of their (fading) memory. A novel procedure for the design of MaxFlat IIR filterbanks with improved passband phase linearity is presented in this paper, as a possible alternative to Kalman and Wiener filters in a class of derivative-state estimation problems with uncertain signal models. Butterworth poles are used for configurable bandwidth and guaranteed stability. Flatness constraints of arbitrary order are derived for temporal derivatives of arbitrary order and a prescribed group delay. As longer lags (in samples) are readily accommodated in oversampled systems, an expression for the optimal group delay that minimizes the white-noise gain (i.e. the error variance of the derivative estimate at steady state) is derived. Filter zeros are optimally placed for the required passband phase response and the cancellation of narrowband interferers in the stopband, by solving a linear system of equations. Low complexity filterbank realizations are discussed then their behaviour is analysed in a Teager-Kaiser operator to detect pulsed signals and in a state observer to track manoeuvring targets in simulated scenarios.
Digital filters with vanishing moments for shape analysis
Dec 26, 2019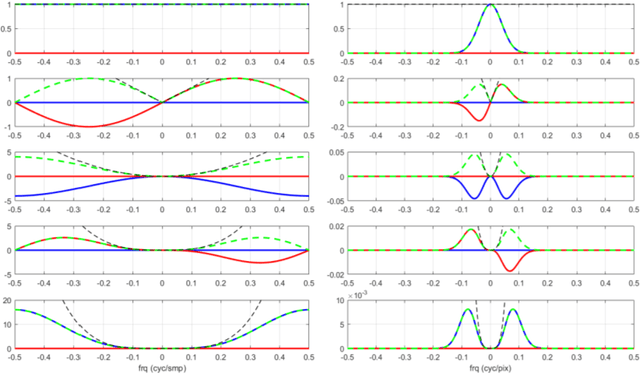
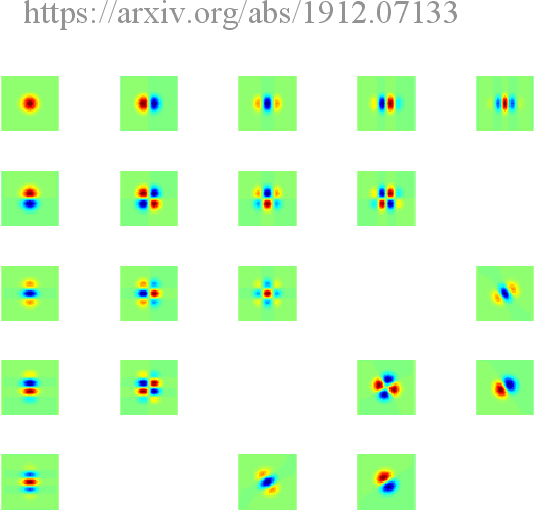
Shape- and scale-selective digital-filters, with steerable finite/infinite impulse responses (FIR/IIRs) and non-recursive/recursive realizations, that are separable in both spatial dimensions and adequately isotropic, are derived. The filters are conveniently designed in the frequency domain via derivative constraints at dc, which guarantees orthogonality and monomial selectivity in the pixel domain (i.e. vanishing moments), unlike more commonly used FIR filters derived from Gaussian functions. A two-stage low-pass/high-pass architecture, for blur/derivative operations, is recommended. Expressions for the coefficients of a low-order IIR blur filter with repeated poles are provided, as a function of scale; discrete Butterworth (IIR), and colored Savitzky-Golay (FIR), blurs are also examined. Parallel software implementations on central processing units (CPUs) and graphics processing units (GPUs), for scale-selective blob-detection in aerial surveillance imagery, are analyzed. It is shown that recursive IIR filters are significantly faster than non-recursive FIR filters when detecting large objects at coarse scales, i.e. using filters with long impulse responses; however, the margin of outperformance decreases as the degree of parallelization increases.
* Revised Appendix (An introduction to recursive filtering for image processing). Added 2 worked examples
Parallel software implementation of recursive multidimensional digital filters for point-target detection in cluttered infrared scenes
Aug 21, 2015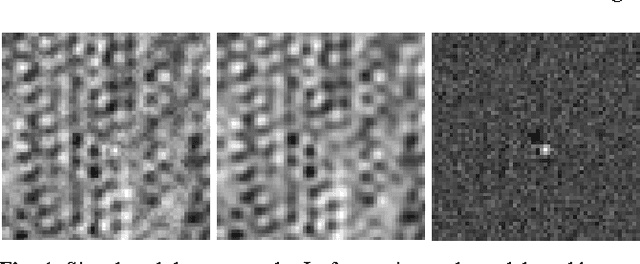
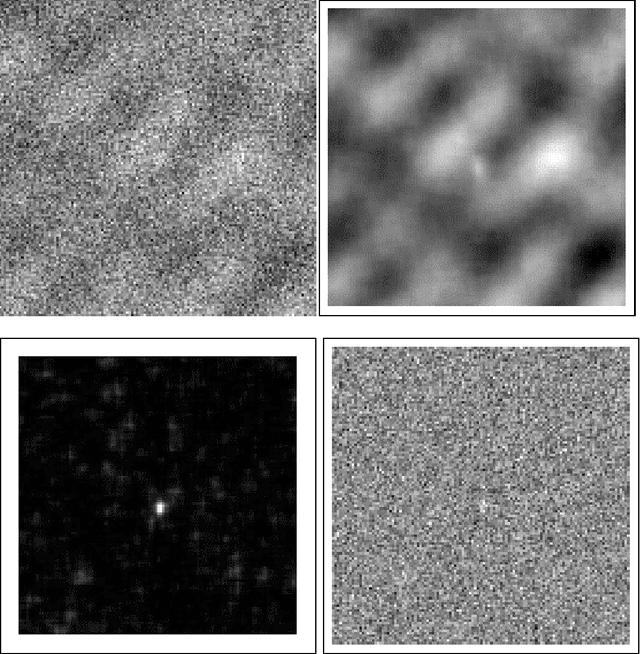
A technique for the enhancement of point targets in clutter is described. The local 3-D spectrum at each pixel is estimated recursively. An optical flow-field for the textured background is then generated using the 3-D autocorrelation function and the local velocity estimates are used to apply high-pass velocity-selective spatiotemporal filters, with finite impulse responses (FIRs), to subtract the background clutter signal, leaving the foreground target signal, plus noise. Parallel software implementations using a multicore central processing unit (CPU) and a graphical processing unit (GPU) are investigated.
Multidimensional Digital Smoothing Filters for Target Detection
Apr 01, 2015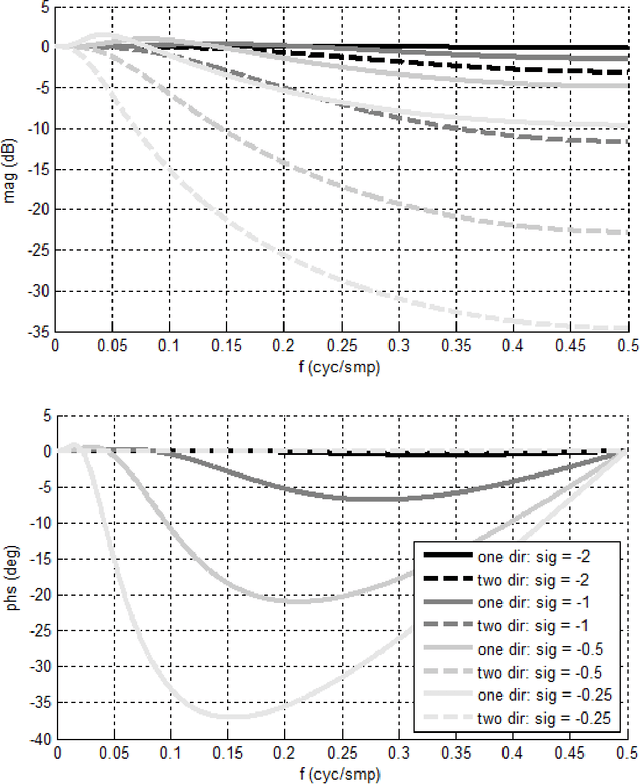
Recursive, causal and non-causal, multidimensional digital filters, with infinite impulse responses and maximally flat magnitude and delay responses in the low-frequency region, are designed to negate correlated clutter and interference in the background and to accumulate power due to dim targets in the foreground of a surveillance sensor. Expressions relating mean impulse-response duration, frequency selectivity and group delay, to low-order linear-difference-equation coefficients are derived using discrete Laguerre polynomials and discounted least-squares regression, then verified through simulation.
* With galley proof fixes
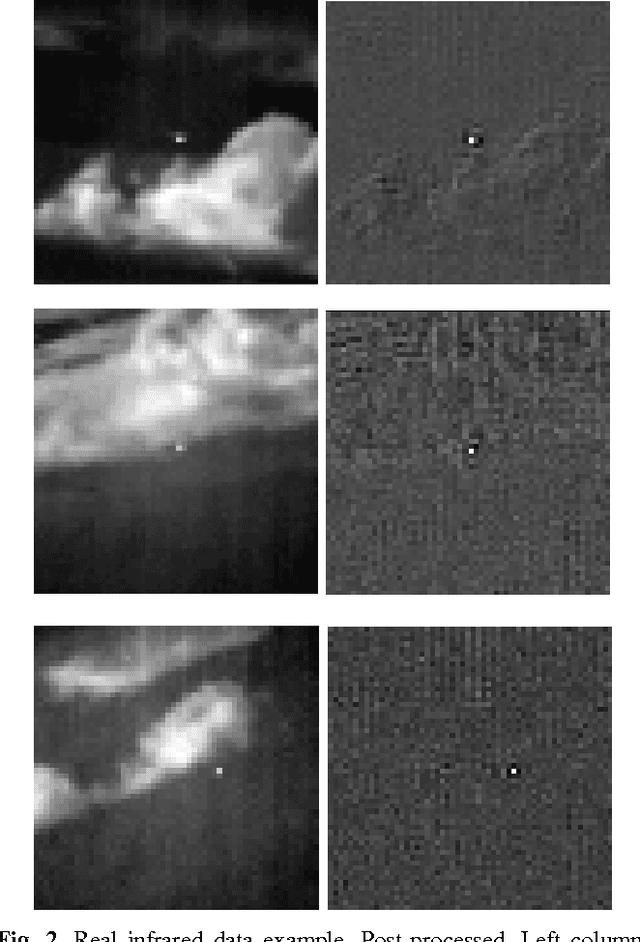
Multidimensional Digital Filters for Point-Target Detection in Cluttered Infrared Scenes
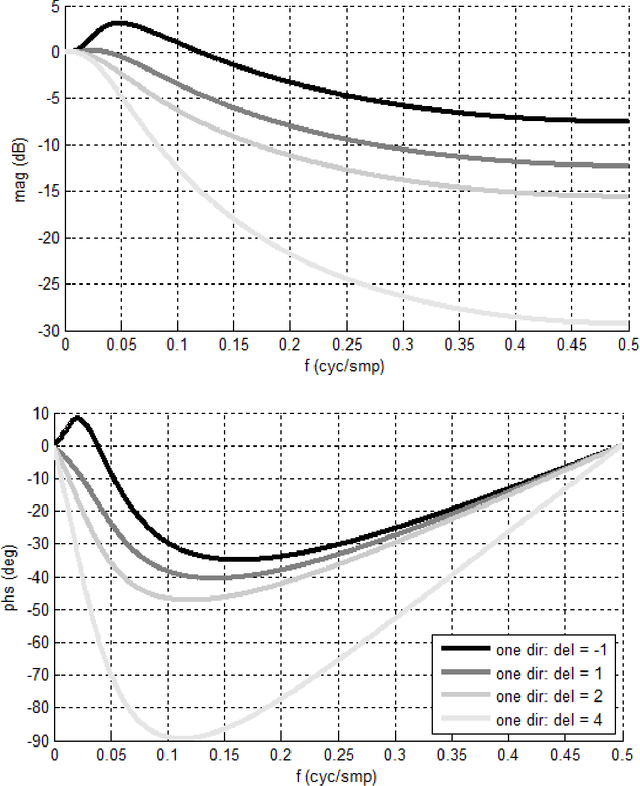
Jan 16, 2015A 3-D spatiotemporal prediction-error filter (PEF), is used to enhance foreground/background contrast in (real and simulated) sensor image sequences. Relative velocity is utilized to extract point-targets that would otherwise be indistinguishable on spatial frequency alone. An optical-flow field is generated using local estimates of the 3-D autocorrelation function via the application of the fast Fourier transform (FFT) and inverse FFT. Velocity estimates are then used to tune in a background-whitening PEF that is matched to the motion and texture of the local background. Finite-impulse-response (FIR) filters are designed and implemented in the frequency domain. An analytical expression for the frequency response of velocity-tuned FIR filters, of odd or even dimension, with an arbitrary delay in each dimension, is derived.
* Accepted version