 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuijing Zhan
Diffusion-EXR: Controllable Review Generation for Explainable Recommendation via Diffusion Models
Dec 24, 2023
Denoising Diffusion Probabilistic Model (DDPM) has shown great competence in image and audio generation tasks. However, there exist few attempts to employ DDPM in the text generation, especially review generation under recommendation systems. Fueled by the predicted reviews explainability that justifies recommendations could assist users better understand the recommended items and increase the transparency of recommendation system, we propose a Diffusion Model-based Review Generation towards EXplainable Recommendation named Diffusion-EXR. Diffusion-EXR corrupts the sequence of review embeddings by incrementally introducing varied levels of Gaussian noise to the sequence of word embeddings and learns to reconstruct the original word representations in the reverse process. The nature of DDPM enables our lightweight Transformer backbone to perform excellently in the recommendation review generation task. Extensive experimental results have demonstrated that Diffusion-EXR can achieve state-of-the-art review generation for recommendation on two publicly available benchmark datasets.
A*3D Dataset: Towards Autonomous Driving in Challenging Environments
Sep 17, 2019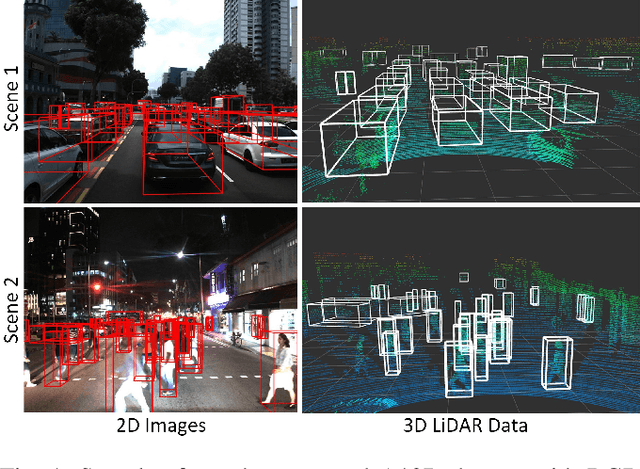
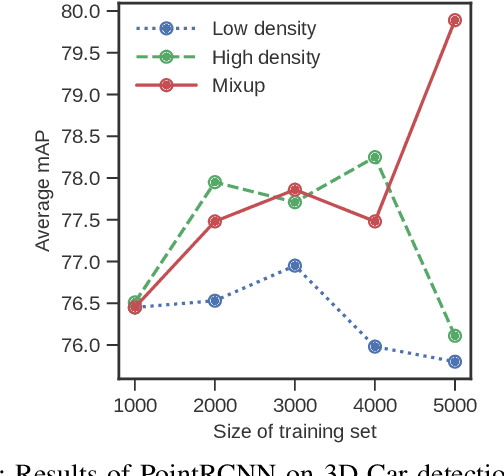
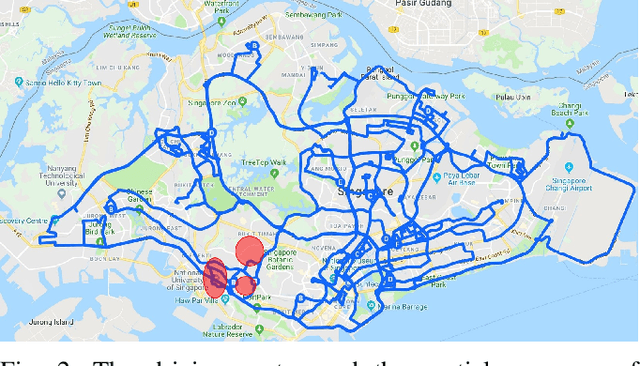
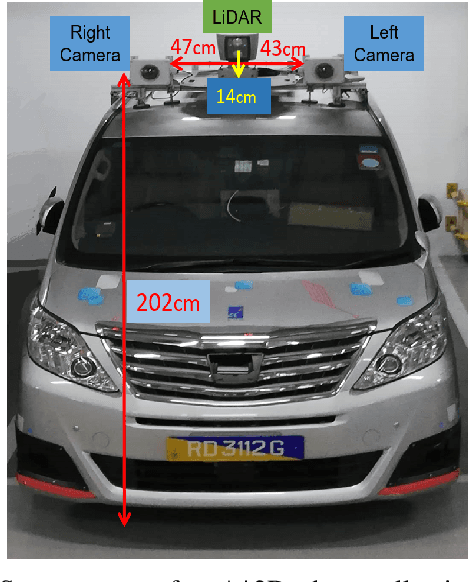
With the increasing global popularity of self-driving cars, there is an immediate need for challenging real-world datasets for benchmarking and training various computer vision tasks such as 3D object detection. Existing datasets either represent simple scenarios or provide only day-time data. In this paper, we introduce a new challenging A*3D dataset which consists of RGB images and LiDAR data with significant diversity of scene, time, and weather. The dataset consists of high-density images ($\approx~10$ times more than the pioneering KITTI dataset), heavy occlusions, a large number of night-time frames ($\approx~3$ times the nuScenes dataset), addressing the gaps in the existing datasets to push the boundaries of tasks in autonomous driving research to more challenging highly diverse environments. The dataset contains $39\text{K}$ frames, $7$ classes, and $230\text{K}$ 3D object annotations. An extensive 3D object detection benchmark evaluation on the A*3D dataset for various attributes such as high density, day-time/night-time, gives interesting insights into the advantages and limitations of training and testing 3D object detection in real-world setting.