Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIgor Sazonov
Precision improvement of MEMS gyros for indoor mobile robots with horizontal motion inspired by methods of TRIZ
Mar 18, 2014
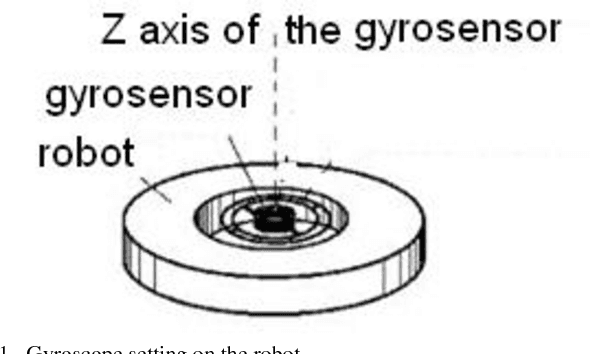
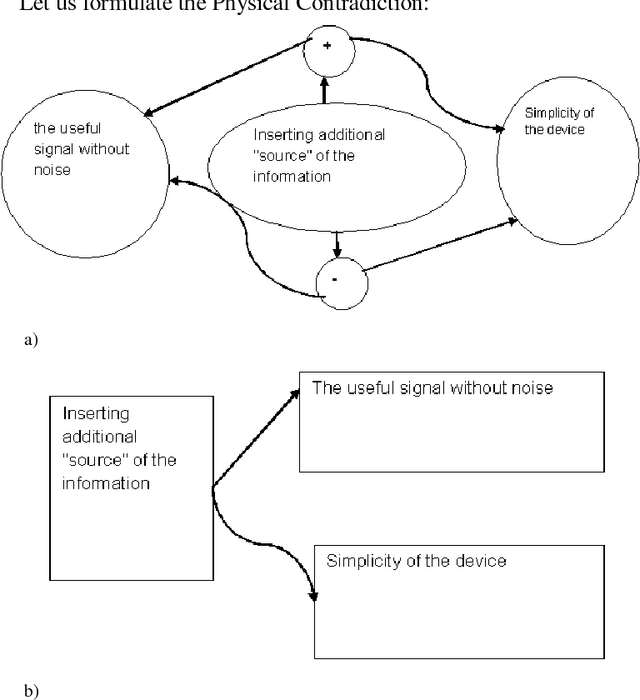
In the paper, the problem of precision improvement for the MEMS gyrosensors on indoor robots with horizontal motion is solved by methods of TRIZ ("the theory of inventive problem solving").
* Proceedings of 9th IEEE International Conference on Nano/Micro
Engineered and Molecular Systems (IEEE-NEMS 2014) April 13-16,
2014,Hawaii,USA, pp 102-107
* 6 pages, the paper is accepted to 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Hawaii, USA (IEEE-NEMS 2014) as an oral presentation
* 6 pages, the paper is accepted to 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Hawaii, USA (IEEE-NEMS 2014) as an oral presentation
Via