 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJ. Christian Gerdes
High Speed Emulation in a Vehicle-in-the-Loop Driving Simulator
Mar 21, 2022

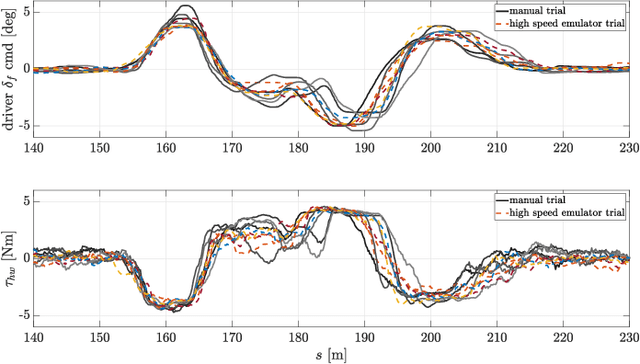
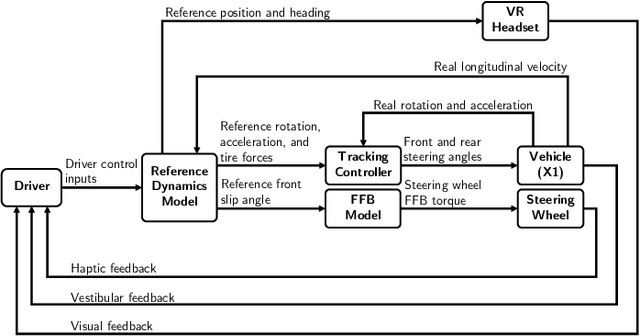
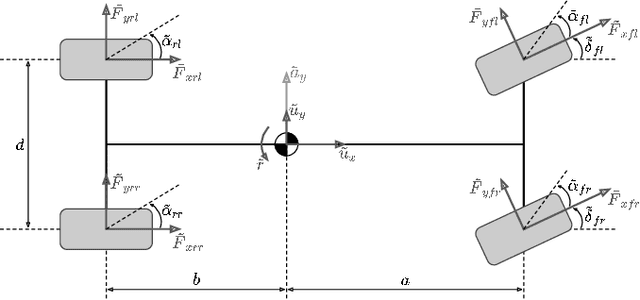
Rendering accurate multisensory feedback is critical to ensure natural user behavior in driving simulators. In this work, we present a virtual reality (VR)-based Vehicle-in-the-Loop (ViL) simulator that provides visual, vestibular, and haptic feedback to drivers in high speed driving conditions. Designing our simulator around a four-wheel steer-by-wire vehicle enables us to emulate the dynamics of a vehicle traveling significantly faster than the test vehicle and to transmit corresponding haptic steering feedback to the driver. By scaling the speed of the test vehicle through a combination of VR visuals, vehicle dynamics emulation, and steering wheel force feedback, we can safely and immersively run experiments up to highway speeds within a limited driving space. In double lane change and highway weaving experiments, our high speed emulation method tracks yaw motion within human perception limits and provides sensory feedback comparable to the same maneuvers driven manually.
Contingency Model Predictive Control for Linear Time-Varying Systems
Feb 27, 2021

We present Contingency Model Predictive Control (CMPC), a motion planning and control framework that optimizes performance objectives while simultaneously maintaining a contingency plan -- an alternate trajectory that avoids a potential hazard. By preserving the existence of a feasible avoidance trajectory, CMPC anticipates emergency and keeps the controlled system in a safe state that is selectively robust to the identified hazard. We accomplish this by adding an additional prediction horizon in parallel to the typical Model Predictive Control (MPC) horizon. This extra horizon is constrained to guarantee safety from the contingent threat and is coupled to the nominal horizon at its first command. Thus, the two horizons negotiate to compute commands that are both optimized for performance and robust to the contingent event. This article presents a linear formulation for CMPC, illustrates its key features on a toy problem, and then demonstrates its efficacy experimentally on a full-size automated road vehicle that encounters a realistic pop-out obstacle. Contingency MPC approaches potential emergencies with safe, intuitive, and interpretable behavior that balances conservatism with incentive for high performance operation.
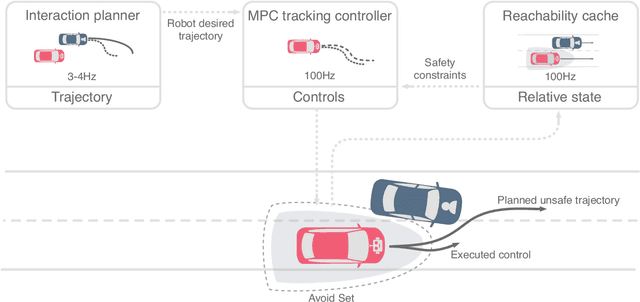
On Infusing Reachability-Based Safety Assurance within Planning Frameworks for Human-Robot Vehicle Interactions
Dec 06, 2020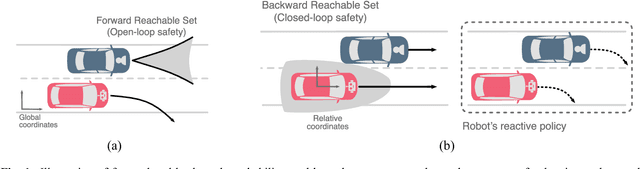

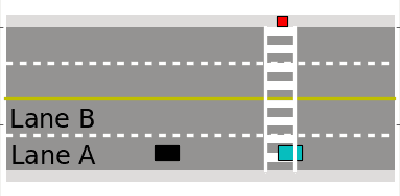
Action anticipation, intent prediction, and proactive behavior are all desirable characteristics for autonomous driving policies in interactive scenarios. Paramount, however, is ensuring safety on the road -- a key challenge in doing so is accounting for uncertainty in human driver actions without unduly impacting planner performance. This paper introduces a minimally-interventional safety controller operating within an autonomous vehicle control stack with the role of ensuring collision-free interaction with an externally controlled (e.g., human-driven) counterpart while respecting static obstacles such as a road boundary wall. We leverage reachability analysis to construct a real-time (100Hz) controller that serves the dual role of (i) tracking an input trajectory from a higher-level planning algorithm using model predictive control, and (ii) assuring safety by maintaining the availability of a collision-free escape maneuver as a persistent constraint regardless of whatever future actions the other car takes. A full-scale steer-by-wire platform is used to conduct traffic weaving experiments wherein two cars, initially side-by-side, must swap lanes in a limited amount of time and distance, emulating cars merging onto/off of a highway. We demonstrate that, with our control stack, the autonomous vehicle is able to avoid collision even when the other car defies the planner's expectations and takes dangerous actions, either carelessly or with the intent to collide, and otherwise deviates minimally from the planned trajectory to the extent required to maintain safety.
* arXiv admin note: text overlap with arXiv:1812.11315
Contingency Model Predictive Control for Automated Vehicles
Mar 21, 2019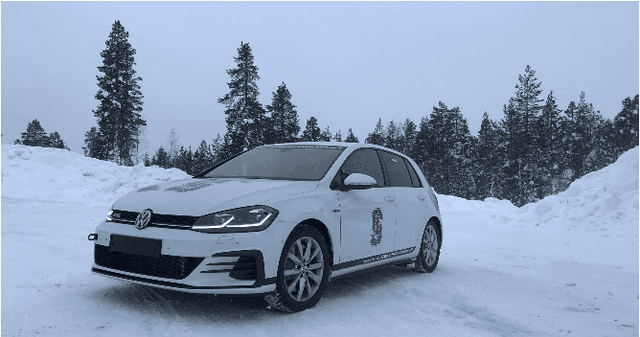
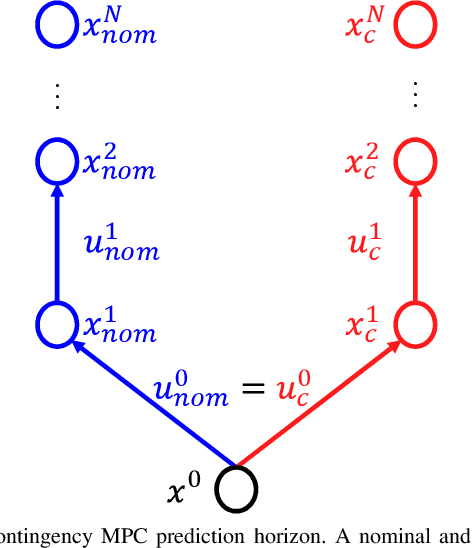
We present Contingency Model Predictive Control (CMPC), a novel and implementable control framework which tracks a desired path while simultaneously maintaining a contingency plan -- an alternate trajectory to avert an identified potential emergency. In this way, CMPC anticipates events that might take place, instead of reacting when emergencies occur. We accomplish this by adding an additional prediction horizon in parallel to the classical receding MPC horizon. The contingency horizon is constrained to maintain a feasible avoidance solution; as such, CMPC is selectively robust to this emergency while tracking the desired path as closely as possible. After defining the framework mathematically, we demonstrate its effectiveness experimentally by comparing its performance to a state-of-the-art deterministic MPC. The controllers drive an automated research platform through a left-hand turn which may be covered by ice. Contingency MPC prepares for the potential loss of friction by purposefully and intuitively deviating from the prescribed path to approach the turn more conservatively; this deviation significantly mitigates the consequence of encountering ice.
Path Tracking of Highly Dynamic Autonomous Vehicle Trajectories via Iterative Learning Control
Feb 02, 2019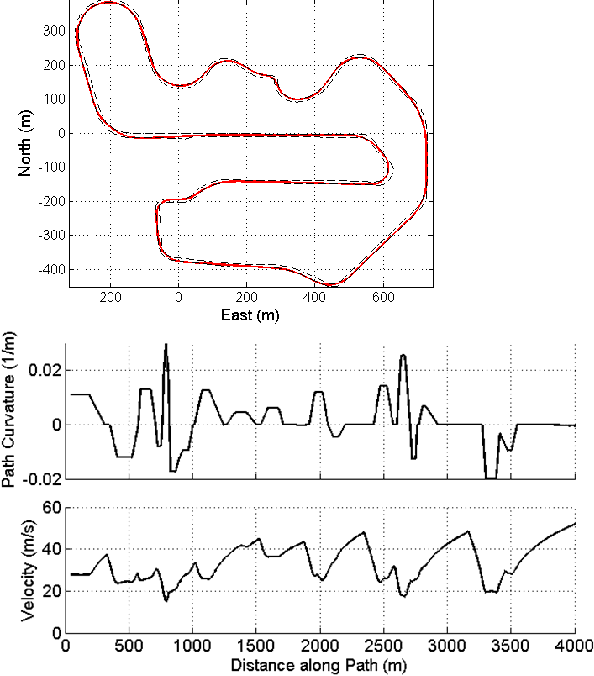
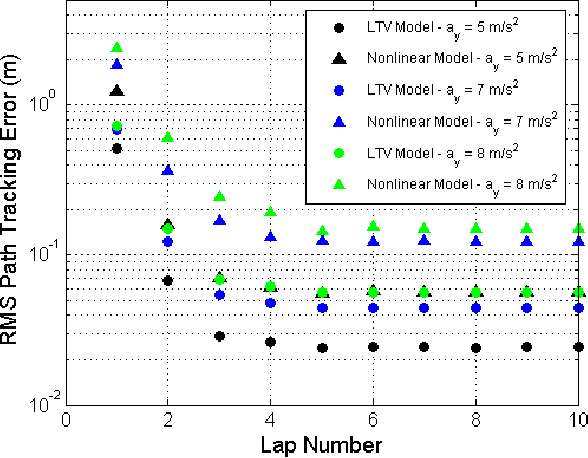
Iterative learning control has been successfully used for several decades to improve the performance of control systems that perform a single repeated task. Using information from prior control executions, learning controllers gradually determine open-loop control inputs whose reference tracking performance can exceed that of traditional feedback-feedforward control algorithms. This paper considers iterative learning control for a previously unexplored field: autonomous racing. Racecars are driven multiple laps around the same sequence of turns while operating near the physical limits of tire-road friction, where steering dynamics become highly nonlinear and transient, making accurate path tracking difficult. However, because the vehicle trajectory is identical for each lap in the case of single-car racing, the nonlinear vehicle dynamics and unmodelled road conditions are repeatable and can be accounted for using iterative learning control, provided the tire force limits have not been exceeded. This paper describes the design and application of proportional-derivative (PD) and quadratically optimal (Q-ILC) learning algorithms for multiple-lap path tracking of an autonomous race vehicle. Simulation results are used to tune controller gains and test convergence, and experimental results are presented on an Audi TTS race vehicle driving several laps around Thunderhill Raceway in Willows, CA at lateral accelerations of up to 8 $\mathrm{m/s^2}$. Both control algorithms are able to correct transient path tracking errors and improve the performance provided by a reference feedforward controller.
A Hybrid Control Design for Autonomous Vehicles at Uncontrolled Intersections
Feb 02, 2019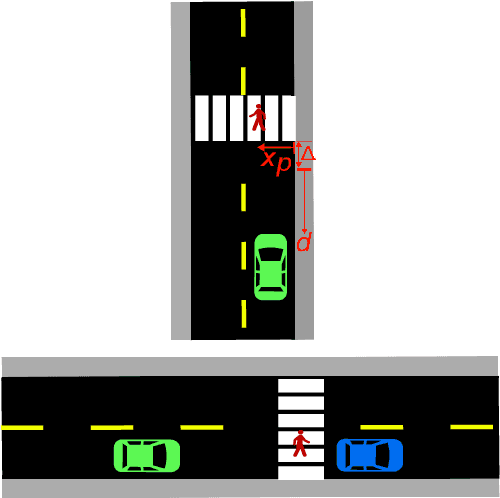
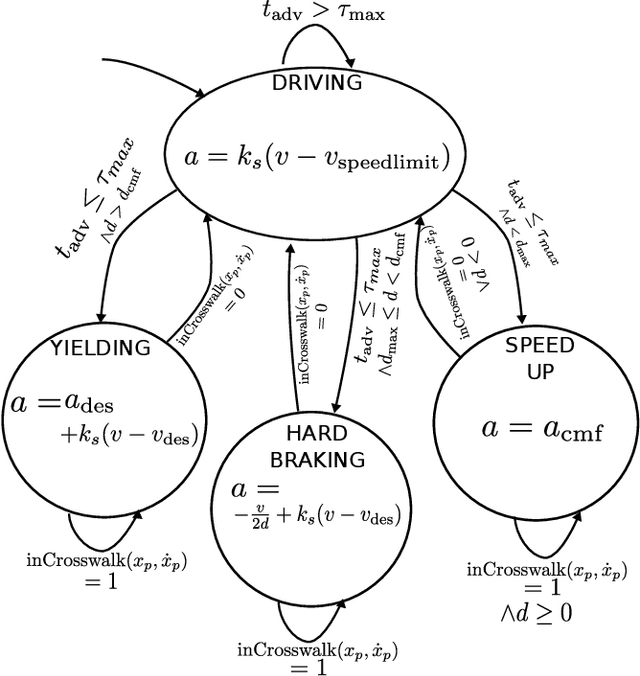
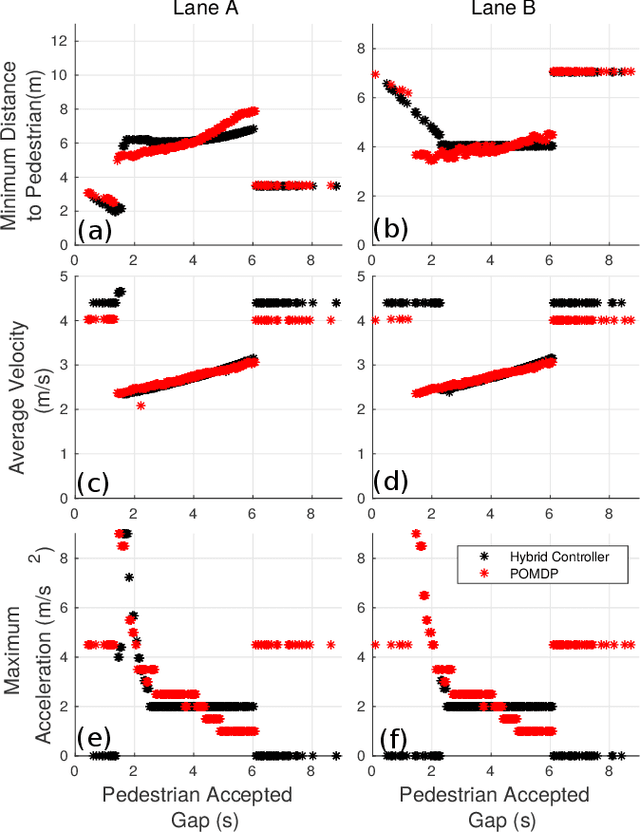
As autonomous vehicles (AVs) inch closer to reality, a central requirement for acceptance will be earning the trust of humans in everyday driving situations. In particular, the interaction between AVs and pedestrians is of high importance, as every human is a pedestrian at some point of the day. This paper considers the interaction of a pedestrian and an autonomous vehicle at a mid-block, unsignalized intersection where there is ambiguity over when the pedestrian should cross and when and how the vehicle should yield. By modeling pedestrian behavior through the concept of gap acceptance, the authors show that a hybrid controller with just four distinct modes allows an autonomous vehicle to successfully interact with a pedestrian across a continuous spectrum of possible crosswalk entry behaviors. The controller is validated through extensive simulation and compared to an alternate POMDP solution and experimental results are provided on a research vehicle for a virtual pedestrian.
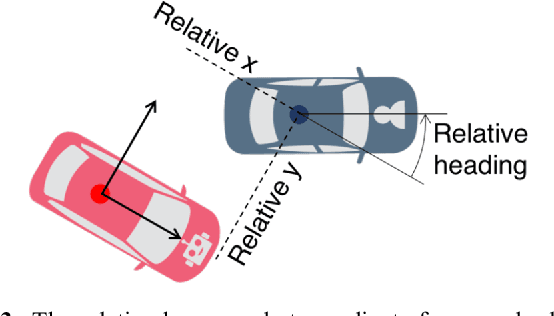
On Infusing Reachability-Based Safety Assurance within Probabilistic Planning Frameworks for Human-Robot Vehicle Interactions
Dec 29, 2018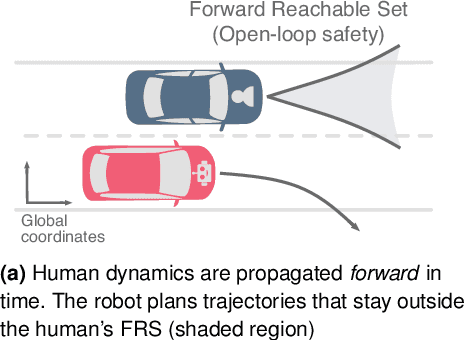

Action anticipation, intent prediction, and proactive behavior are all desirable characteristics for autonomous driving policies in interactive scenarios. Paramount, however, is ensuring safety on the road --- a key challenge in doing so is accounting for uncertainty in human driver actions without unduly impacting planner performance. This paper introduces a minimally-interventional safety controller operating within an autonomous vehicle control stack with the role of ensuring collision-free interaction with an externally controlled (e.g., human-driven) counterpart. We leverage reachability analysis to construct a real-time (100Hz) controller that serves the dual role of (1) tracking an input trajectory from a higher-level planning algorithm using model predictive control, and (2) assuring safety through maintaining the availability of a collision-free escape maneuver as a persistent constraint regardless of whatever future actions the other car takes. A full-scale steer-by-wire platform is used to conduct traffic weaving experiments wherein the two cars, initially side-by-side, must swap lanes in a limited amount of time and distance, emulating cars merging onto/off of a highway. We demonstrate that, with our control stack, the autonomous vehicle is able to avoid collision even when the other car defies the planner's expectations and takes dangerous actions, either carelessly or with the intent to collide, and otherwise deviates minimally from the planned trajectory to the extent required to maintain safety.