 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Gaussian Process Mapping for Robot Teams with Time-varying Communication
Oct 12, 2021



Multi-agent mapping is a fundamentally important capability for autonomous robot task coordination and execution in complex environments. While successful algorithms have been proposed for mapping using individual platforms, cooperative online mapping for teams of robots remains largely a challenge. We focus on probabilistic variants of mapping due to its potential utility in downstream tasks such as uncertainty-aware path-planning. A critical question to enabling this capability is how to process and aggregate incrementally observed local information among individual platforms, especially when their ability to communicate is intermittent. We put forth an Incremental Sparse Gaussian Process (GP) methodology for multi-robot mapping, where the regression is over a truncated signed-distance field (TSDF). Doing so permits each robot in the network to track a local estimate of a pseudo-point approximation GP posterior and perform weighted averaging of its parameters with those of its (possibly time-varying) set of neighbors. We establish conditions on the pseudo-point representation, as well as communication protocol, such that robots' local GPs converge to the one with globally aggregated information. We further provide experiments that corroborate our theoretical findings for probabilistic multi-robot mapping.
Optimal Multi-Manipulator Arm Placement for Maximal Dexterity during Robotics Surgery
Apr 13, 2021


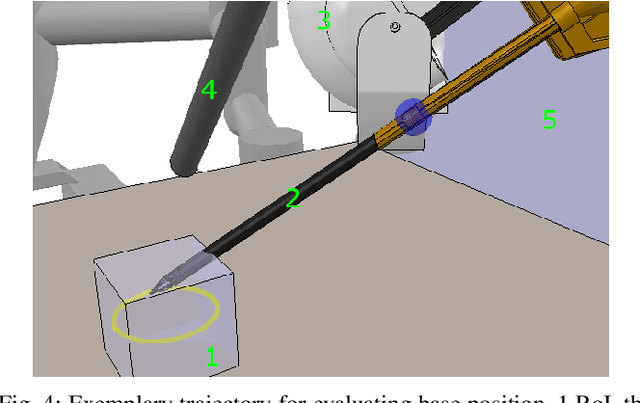
Robot arm placements are oftentimes a limitation in surgical preoperative procedures, relying on trained staff to evaluate and decide on the optimal positions for the arms. Given new and different patient anatomies, it can be challenging to make an informed choice, leading to more frequently colliding arms or limited manipulator workspaces. In this paper, we develop a method to generate the optimal manipulator base positions for the multi-port da Vinci surgical system that minimizes self-collision and environment-collision, and maximizes the surgeon's reachability inside the patient. Scoring functions are defined for each criterion so that they may be optimized over. Since for multi-manipulator setups, a large number of free parameters are available to adjust the base positioning of each arm, a challenge becomes how one can expediently assess possible setups. We thus also propose methods that perform fast queries of each measure with the use of a proxy collision-checker. We then develop an optimization method to determine the optimal position using the scoring functions. We evaluate the optimality of the base positions for the robot arms on canonical trajectories, and show that the solution yielded by the optimization program can satisfy each criterion. The metrics and optimization strategy are generalizable to other surgical robotic platforms so that patient-side manipulator positioning may be optimized and solved.